This week I worked on:
- Worked with teammates on what type of arm movement should be used to grab items and place into the bin
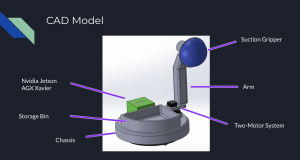
- Followed TA’s suggestions on a two-motor system
- Finalizing the CAD model for the whole robot (seen below)
- Worked on the design presentation
Next week I will work on:
- Finalizing the parts list needed for the robot and making order requests
- Learning how to integrate the Arduino, Jetson AGX Xavier, and the iRobot base