This week, I was working on the design review in preparation for the design presentation. As such, a lot of time was devoted into thinking about the design decisions and whether or not these decisions were the best way to approach our problem/project.
I was hesitant about using OpenCV and whether or not it could be accurate, and we recognized as a risk factor, and as such added a backup. As such, Jeff and I decided that we should use OpenPose as a backup, and have it running as well as OpenCV. We realized that OpenPose takes up a lot of GPU power and would not work well on the Nano given that the Jetson Xavier (which has about 8 times the GPU capabilities) resulted in 17 fps with OpenPose video capture. As such, we decided to use AWS to run OpenPose, and I am in the process of setting that up. We have received AWS credit and we just need to see if AWS can match our timing requirements and GPU requirements.
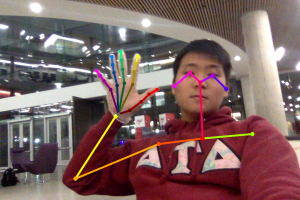
Our initial idea revolves around a glove that we use that tracks joints. We were originally thinking of a latex glove where we would mark the joint locations with a marker, but we thought that the glove would then interfere with OpenPose tracking. We tested this out and we found out that OpenPose is not hindered even with the existence of the glove as shown on the picture below.
This week, I have to make a glove joint tracker with OpenCV. I’ve installed OpenCV and have been messing around it, but now I will have to implement a tracker that will give me a list of joint locations. This will probably be a really challenging part of the project, so stay tuned in for next weeks update!