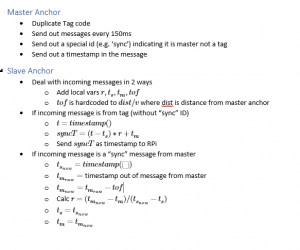
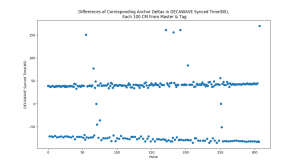
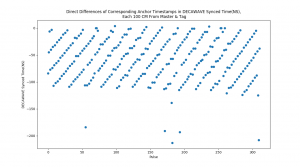
This week, I collected more experimental data for Udit and Rhea to use in tuning the multilateration algorithm. I implemented a time-sync algorithm in the Decawave chips that uses a master chip which periodically broadcast its own timestamp, which the slave anchors adjust their own clocks in response to, before transmitting pulse reception timestamps to the Raspberry Pi.
I also assembled an experimental setup to test the algorithm, setting up the tags and anchors in a 1×1 meter square. I set up two slave anchors that broadcast the time of pulse reception to the Raspberry Pi server, a master that only broadcasts a timestamp, and a stationary tag that broadcasts its ID. The setup was meant to keep both anchors 1 meter away from both the tag and the master simultaneously.

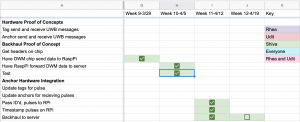
Our progress is on schedule for a demo this Wednesday. Udit and Rhea have been making substantial progress towards an effective multilateration algorithm with imperfect data, and I have established a consistent workflow for graphing and collecting timestamp data from multiple anchors and multiple tags simultaneously.
This week I will perform any final tests that Udit and Rhea need to fine-tune the multilateration algorithm, and then we will demo on Wednesday.