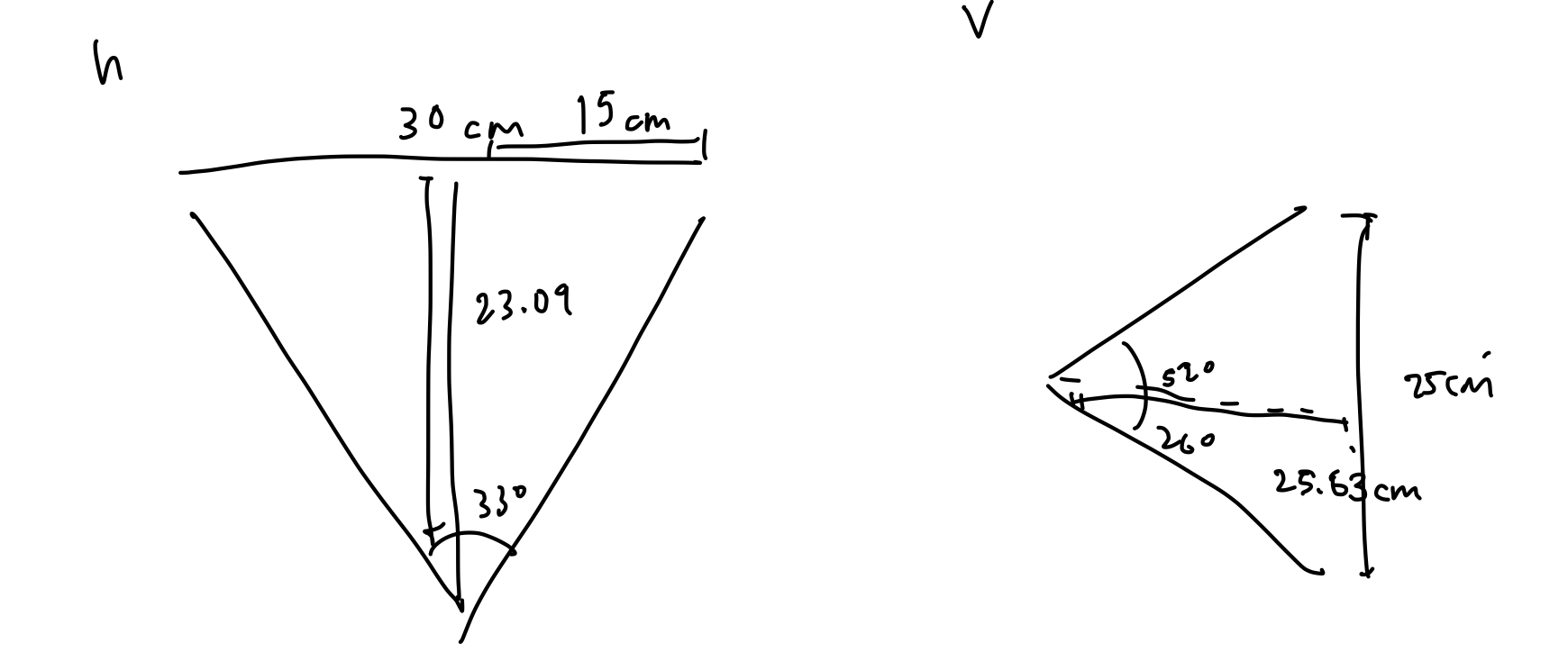
This week, I was working on two main parts, finalizing the project requirements with the team and researching on sensor capsule and platform. In finalizing the project requirements, I mainly worked on the Usability requirement as the other parts were mostly done together with other team members. At the beginning of the week, we decided we would potentially be using Intel real-sense depth camera (RGB-D camera using coded light) instead of other cameras and sensors for our sensor (though this may change now after getting feedback from Professor Mukherjee). First, we updated the Usability requirement where we specified our object dimensions to be from 5cm to 25cm along each axis. After getting sensor specifications and information from Jeremy, I computed the platform dimensions. The Intel real-sense depth camera S305 has Depth Field of View (Horizontal x Vertical) of 69 degrees +- 3 degrees and 54 degrees +- 2 degrees. From this information, I computed that the camera has to be around 26 cm away from the object side. The image below shows the basic calculation and our initial design of the platform.
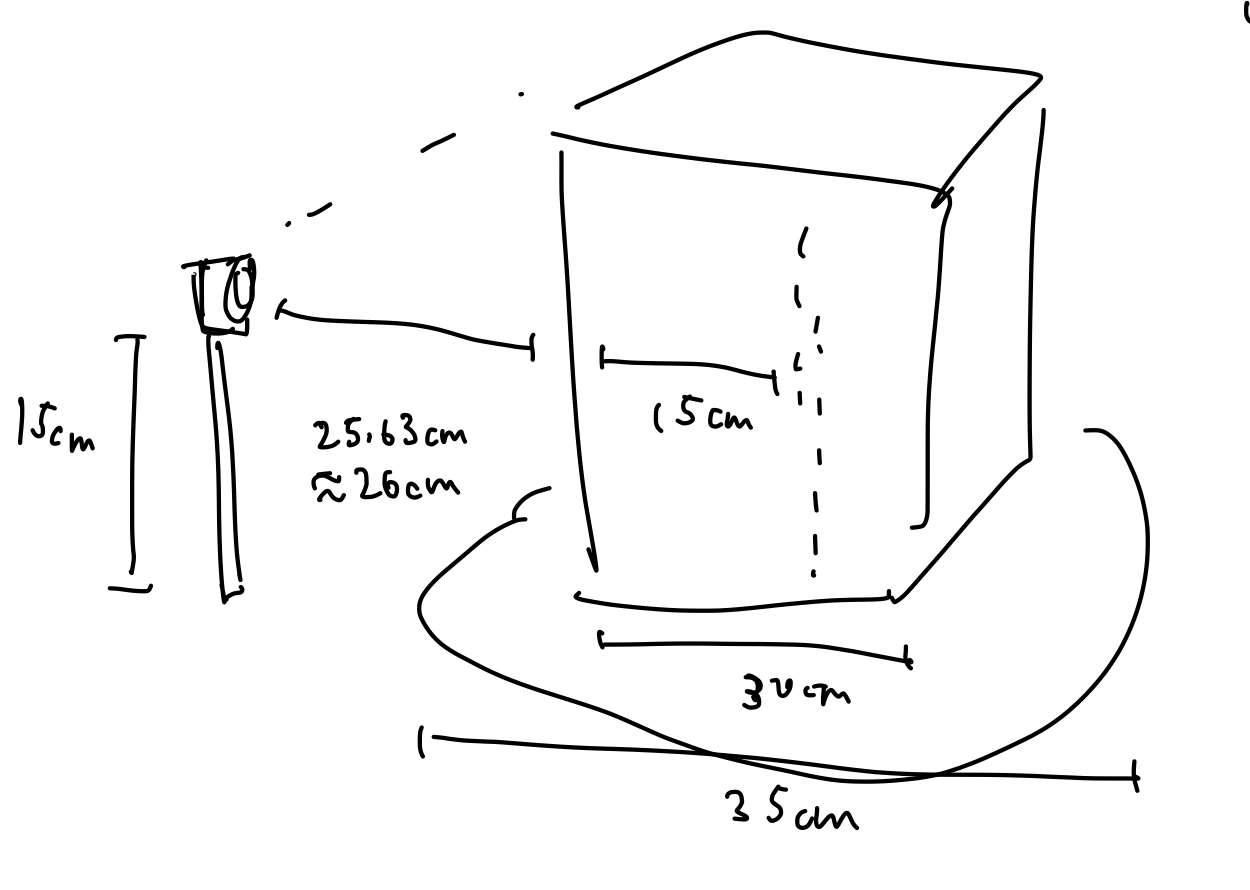
Our initial design places the camera at the center of the largest object size possible, but this may have to be calibrated depending on the reconstruction technique we decide to use and the data we receive from the sensor. However, this would be done later once we have the basic implementation of the system done.
Another metric we added to the Usability requirement is also the weight limit of the input object size. Since our use-case is to be able to model archaeological documentation, I used baked clay and potteries as our base. The average pottery pot thickness is around 0.6-0.9cm in which I rounded up to 1cm. With this, I computed the volume based on our maximum input object dimensions and used the density of baked clay to compute the average mass of the object, 6.91kg. We rounded this up and used 7kg as our input object weight limit. Since we would also be testing by printing out 3D object from models, I used the density of plastic to compute that our test objects would have mass under our weight limit in which they do (around 4.3kg).
After having the weight requirement and platform dimensions, I started researching on how to design a rotational mechanism.
My progress is a little behind schedule. This is mainly because we still have not fully decided on the sensor type to use, so the platform design may have to change in the future. Our team would have to finalize our sensor by this Monday at the latest so that I would have time to design the platform and rotational mechanism. Moreover, I am also behind schedule because I underestimated the complexity of the rotational mechanism. I would have to do a lot more research and potentially ask for advice from someone with expertise in the area.
For next week, I hope to finish the draft design of the rotational mechanism and the platform. After doing some research, I now realize that I would have to take into account the object’s weight distribution to calculate moments and determine the ratio I need of the base to the platform to ensure stability. In addition, I would also need to compute how much torque I need on the motor to be able to order the right mechanical components. I would also need to design a feature extractor system that, based on the weight of the object, be able to control the rotational mechanism to give the sensor the rotation velocity it needs. I would also need to do more research on the material type of the platform itself.