This week, I mostly assisted Joy and Kenny with the integration of the mount electronics with the remainder of the mount. In Kenny’s case, this was just a matter of checking in on his progress with assembling the electronics (both on PCB and breadboard). In Joy’s case, this meant going over the meaning of the logic inputs of the unipolar and bipolar motor drivers, and the sequences in which they were supposed to be driven to effect a full-step sequence.
I also checked Joy’s motor driver code against the full-step sequences described online for bipolar and unipolar stepper motors, and wrote test cases in motor_driver/main.cpp. If all goes smoothly, main.cpp should cause one of the unipolar Digikey motors to rotate 3 times before reversing to the original position at 1 RPM, while setting one of the bipolar NEMA 17 motors to rotate at 60 RPM for a minute before turning off.
As a debugging aid, I also drew logic diagrams for the bipolar motor driver inputs that indicate the direction of current flow for different values of EN and PWM and labeled full-step sequence diagrams:
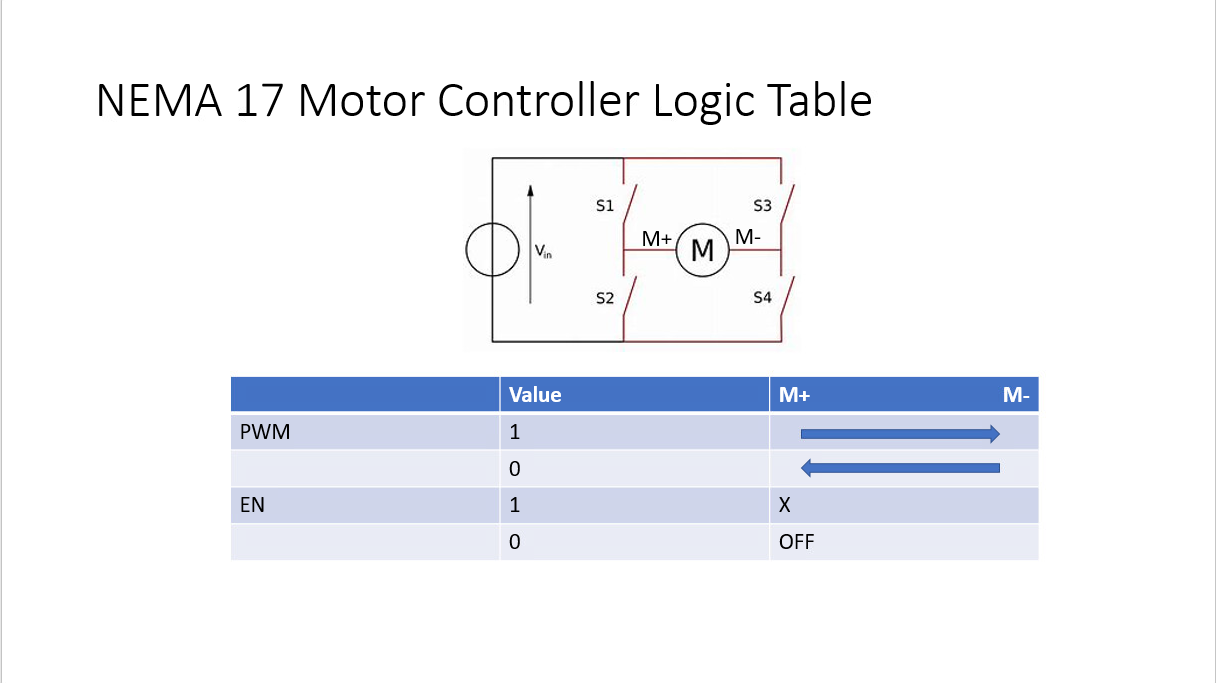
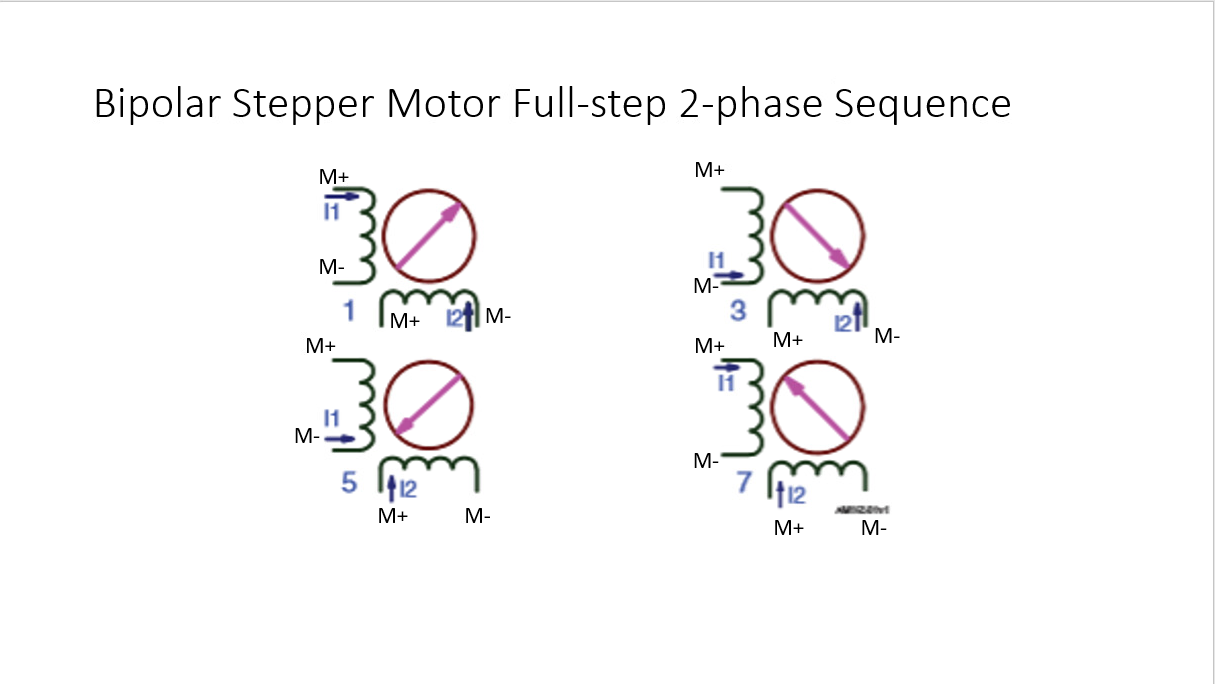
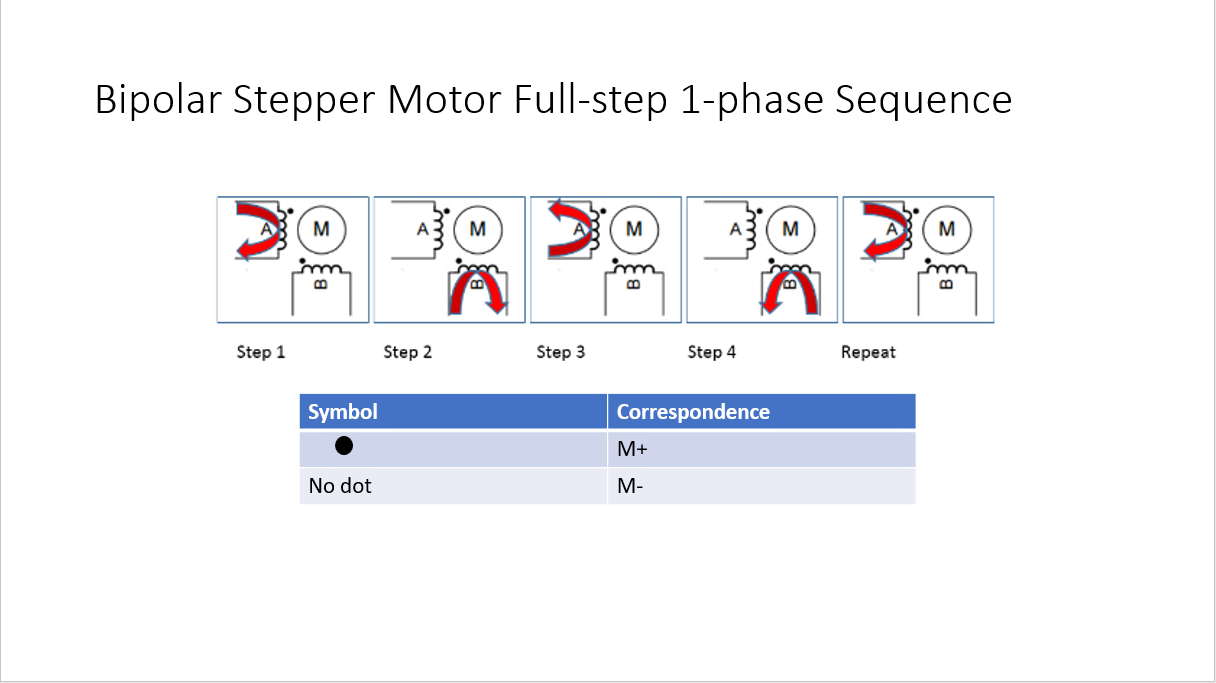
I felt that it was unnecessary to do the same for the unipolar motor driver, due to the lower complexity of the stepping sequence.
Thus far, I’m on track relative to the schedule. Next week, I need to start working on preparing materials for the demo video that cover my contribution to the project, while continuing to advise Kenny on the assembly and testing of the motor drivers. Since the vast majority of my tasks are complete, I will also spend some time working on the final report for the project.