- Collaborated with team to figure out the problem with the NodeMcus. Tried programming the NodeMcu via Platformio instead of the arduino ide to see if the problem was a software issue. It wasn’t
- Tested object detection algorithm for accuracy and speed. Recorded worst-case metrics to use for the design of our pipeline.
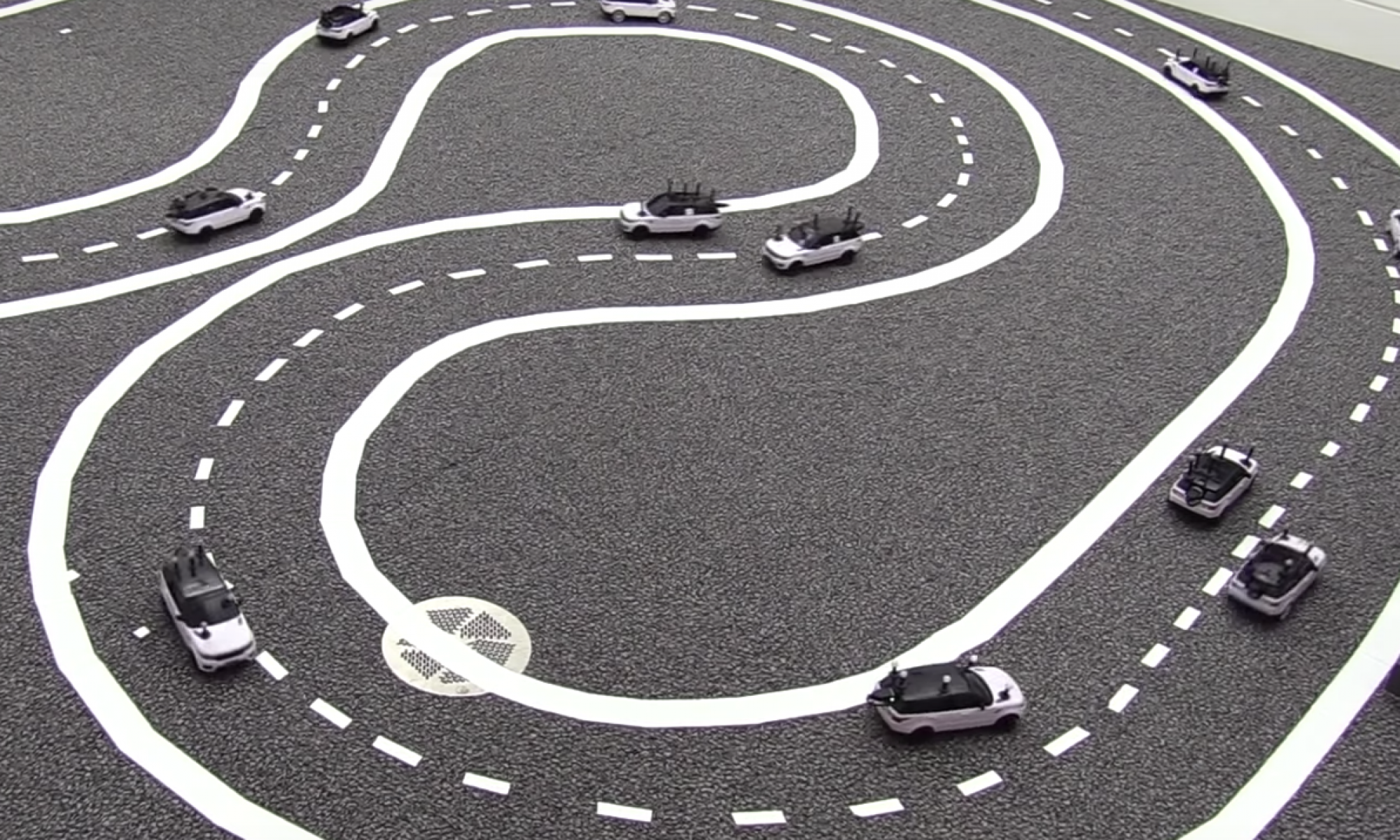
- Experimented with various setups/conditions such as number of cars the algorithm is able to detect within one frame and the height above the track with which the algorithm could still accurately identify the cars.
- Camera and mount came in so put together the mount and set it up with the camera to demo and test the performance of the set up. (i.e test the resolution of the camera and how well it detects the markers/ the optimal height of the camera above the track
- Simulate blurry frames (due to the motion of the cars) and test accuracy of the object detection mechanism under sub-optimal conditions.
Tito status update
Started working on object detection starter code. First trying out aruco marker based detection.