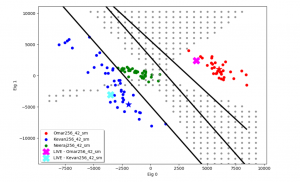
This week I pair-programed with Neeraj to implement the usage of SVM over Kmeans for recognition of the fisherface eigen coefficients. In other words, rather than trying to match a new face to the nearest centroid in the eigenspace, we partition the eigenspace into zones using SVM and label them accordingly. We also selected a more optimal selection of PCA eigenvectors (dropping only the first two). The combination of these led to remarkable success in our recognition algorithms. We are now seeing more than 90% accuracy in recognition.
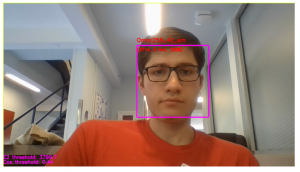
Part of our success above was thanks to implementing a tool which helps us visualize where faces land in the eigenspace. I programmed a tool which displays live the location of a face in the eigenspace along with the existing camera frame visualizer. Below image displays that tool (X marks the spot of the live face representation).
I found some bugs with the cosine and E2 stranger detection metrics and fixed them.