Group Update
- Overall, we are on track to have a moving robot and basic navigation by the first demo in about two weeks.
Amukta’s Update
- I spent the week experimenting more with the RPLidar SDK and output data, and beginning to work on ICP. I am currently working on closest point approximation using point to plane scan matching.
- Over the past two weeks, I finished up the visualization web client and server, which should clear up 5-10 days I set aside in April according to the Gantt chart. See the code here.
- I am on-track, as I’ve cleared up some tasks ahead of time.
Kanupriyaa’s Update
- I spent the week setting up the development for the ICP, the VMWare software and Ros for the development.
- I made the algorithm for ICP and divided the work amongst Amukta and me for the development. Algorithm consists of minimization of ICP error function using point to plane matching.
- Next week I will implement the minimization function and get the final ICP translation.
Tiffany’s Update
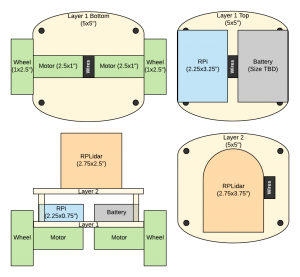
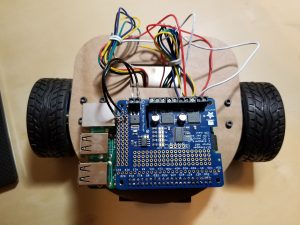
- I spent a few days this week finding components, designing a CAD file of the robot using SolidWorks, and assembling a prototype that can be used for testing. The final robot will have an additional layer with the same shape for mounting the RPLidar, but I did not lasercut this piece yet since Amukta was working with the RPLidar this week.
- Additionally, I wrote a ROS package to send motor commands to the motors. I also added distance/angle calculations for getting the robot from point A to B, and P(ID) control for the base and differential motor commands (left motor = base + differential; right motor = base – differential.
- I am one week behind with writing the global path planner, due to my time spent previous weeks on researching path planning and writing the detailed design report.