One of the most significant risks in our project lies within the accuracy of our computer vision algorithm. We plan to combat this by using a suggestion box after analyzing a circuit – this box will display the five circuits that our algorithm has the highest confidence in. From these circuits, the user can choose which circuit is the one that they drew. By doing this, we are able to achieve higher levels of accuracy without needing to perfectly detect every component. We also are moving the labeling of each component value to the application instead of in the drawing. Rather than having users write the value associated with a component right next to it, we will have them enter in the relevant information once the circuit has been loaded into the applications. This way our computer vision algorithm will not have a hard time trying to figure out which value is associated with each component.
Changes were made in regards to our initial idea of creating a web application. After discussion, our group came to a conclusion that using a mobile application would make more sense given our specified use case of accessibility for middle schoolers. Due to this, all the work done on the web application will be discarded and next week Jaden will be focusing on learning and developing the mobile application instead. As around a week of work has been voided, more hours must be put in to make up the time that was lost over this past week.
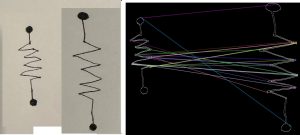
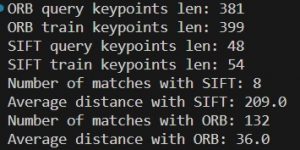
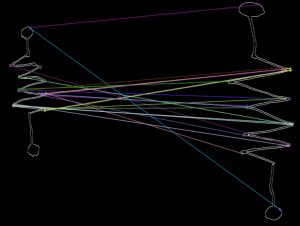
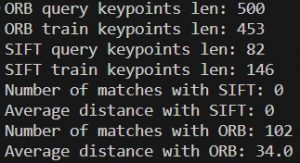
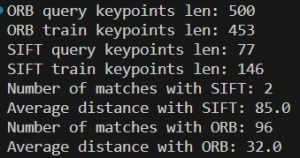
We have also been spending lots of time on creating our design presentation – we made many changes since our proposal presentation that had to be added to the design presentation. While creating the presentation, we did lots of research on other computer vision algorithms that were used in similar applications to figure out how to justify our accuracy expectations. Between the team over 20 research papers were looked into in regards to this issue. Papers included sentence recognition, electronic component recognition, and other computer vision models. We ultimately decided that for computer vision we will utilize the Hough circle algorithm for image segmentation, ORB transform for feature detection, and a Brute Force matcher for feature matching.
We ended up making many changes to our project in the past couple of weeks that we believe will help mitigate risks that will occur with our computer vision algorithm and with having a complex backend. Even though we wasted a week on the web application, since we do not have to setup a complex backend we are still on track with our schedule and are making good progress with our project.