This week I was able to sort out how to run the program on the RPi on start-up, allowing it to be used in headless mode.
We tried integrating Ryan’s part and my part today and ran into issues calling his python scripts from my program. The system() command frequently causes the entire Pi to crash. Ryan is attempting to work around this with another scripting tool, while I am trying to troubleshoot the system() command. We also found a small bug in the legality check that I will correct tonight. Otherwise, everything between the hardware and the firmware is working great.
Hoping we can fix everything up for the demo on Monday.
 The bimodal sensor outputs 5V for a high strength magnet. As you can see in the chart, our highest strength magnet only resulted in a 3.4V output. We learned that our calculations for magnetic field strength at a small distance from the surface gauss and the height of the magnet were above the real quantities. From this, we know we have to find some stronger/larger magnets to buy if we want to distinguish between piece types. We should have an order in for those by Tuesday, and can do some preliminary tests with them inside the chess pieces next weekend.
The bimodal sensor outputs 5V for a high strength magnet. As you can see in the chart, our highest strength magnet only resulted in a 3.4V output. We learned that our calculations for magnetic field strength at a small distance from the surface gauss and the height of the magnet were above the real quantities. From this, we know we have to find some stronger/larger magnets to buy if we want to distinguish between piece types. We should have an order in for those by Tuesday, and can do some preliminary tests with them inside the chess pieces next weekend.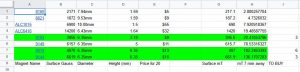
Recent Comments