All the class time this week was spent on Design Report presentations. Outside of class, I continued to work on the legality check program. I incorporated the legal move generation from stockfish 11, and it can now generate a list of legal moves given a position, and check the legality of a new move using that list. It remembers the previous position and can be reset to it (for the case of an illegal move being played). Currently, it takes moves in ‘pure algebraic coordinate notation’ as input (e.g. a3a8, which represents a piece moving from square a3 to square a8). I started working on the function to translate the output of the sensors to this coordinate notation. Next week I should begin work on the firmware, interfacing with the sensors through the ADC and multiplexers, and finish up the translation of boards to coordinates. I have the skeleton written already for the state logic to control LEDs on the board based on whether a move was legal or illegal, but I have to incorporate the interactions with the RPi’s GPIO pins with those functions. Overall, I am on schedule and have no current concerns.
Patrick’s Status Report for 10/1
Earlier this week, I decided on using Stockfish’s legal move generation and spent time reading through the Stockfish source code and understanding the interactions of different structures and functions. I worked on incorporating their move generation into my legality check program, and will continue on this next week. Also, I decided to store moves as piece source and destination squares in the legality check to easily interface with Stockfish. The current plan is for Ryan’s database/web code to translate these to notation. This leaves me on schedule for the legality check and firmware development.
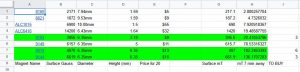
Our test batch of magnets and sensors arrived on Thursday, and I tested them with Vikram today. We tested 7 different types of magnets with the bimodal hall-effect sensor. The resulting output voltages are shown in this table. The bimodal sensor outputs 5V for a high strength magnet. As you can see in the chart, our highest strength magnet only resulted in a 3.4V output. We learned that our calculations for magnetic field strength at a small distance from the surface gauss and the height of the magnet were above the real quantities. From this, we know we have to find some stronger/larger magnets to buy if we want to distinguish between piece types. We should have an order in for those by Tuesday, and can do some preliminary tests with them inside the chess pieces next weekend.
The bimodal sensor outputs 5V for a high strength magnet. As you can see in the chart, our highest strength magnet only resulted in a 3.4V output. We learned that our calculations for magnetic field strength at a small distance from the surface gauss and the height of the magnet were above the real quantities. From this, we know we have to find some stronger/larger magnets to buy if we want to distinguish between piece types. We should have an order in for those by Tuesday, and can do some preliminary tests with them inside the chess pieces next weekend.
Patrick’s Status Report for 9/24
Class time this week was entirely devoted to the proposal presentations. I’m thankful for the questions I received after the presentation, as they got us to think about areas of the project that we had overlooked and solutions we hadn’t considered. Outside of class, I created a short list of options for magnets that would fit in our chess pieces and weren’t too expensive.
I tried to find options that cover a large range of magnetic field strengths (about 2000 to 15000 surface Gauss), so that we can buy some from different ends of the range to test the sensing before committing. I worked with Vikram to narrow down this list to 3 different magnets, based on what we think will work best with the hall effect sensors he found. I have also been working on the legal move generation algorithm and notation list, and I hope to finish it next week. This puts me slightly behind schedule, as I had hoped to finish legal move generation this week. However, I have plenty of time to finish it by Wednesday and so shouldn’t have a problem getting back on schedule, with the legal move generation and legality check program done by next weekend.
Recent Comments