10/10-16
I mainly worked on the design document. I created a system diagram to illustrate the overall flow of our project and recreated the block diagram. I also wrote the requirements section for LEDs and trade study sections for LEDs and board integration.
10/17-23
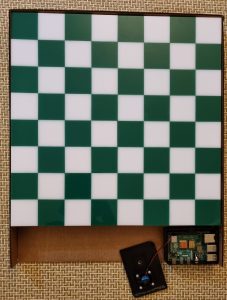
Earlier this week, I laser cut the squares for the second chessboard. Due to time and cost constraints, the plan is to only make one complete chessboard with the LEDs and push button installed. The second chessboard will just be the chessboard top without any LEDs, to allow Anoushka and Yoorae to test CV while I make the main chessboard.
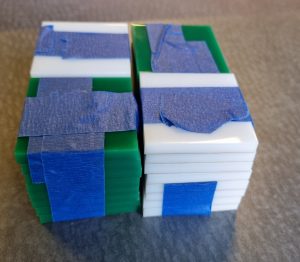
The weld-on glue has arrived, so I have started gluing the squares. As of 10:30 pm, I have been able to glue 24 squares. The gluing part is taking longer than expected. The initial bond forms within a few minutes, and I have to hold the pieces together during this 2-3 minute period before moving on to the next piece. My goal is to finish welding all 64 squares by Sunday night. Due to time constraint, for the sample chessboard, instead of using glue, I will use tape to hold the pieces together.
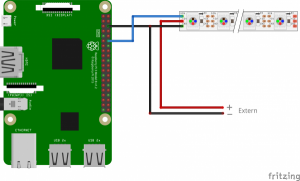
I have set up the Raspberry Pi. There was an issue at the beginning. When I connected the RPi for the first time, I got a missing HDMI output message on the monitor. I tried every solution on the internet but could not solve it. As a last resort, I decided to use a different SD card to see if the SD card was the issue. I formatted and installed NOOBS on the new card and was able to see a signal on the monitor. I have installed the NeoPixel library for the LEDs. Because of the initial SD card error, I was not able to test the LEDs with the RPi yet.
Next week, I am planning to connect the LEDs to the RPi and test them. I will also laser cut the internals of the chessboard for the LED matrix. Lastly, I am going to place an order for the wooden sheets and push button.