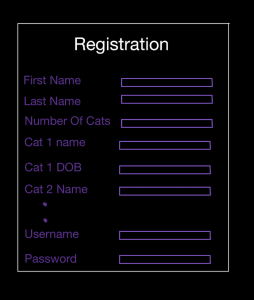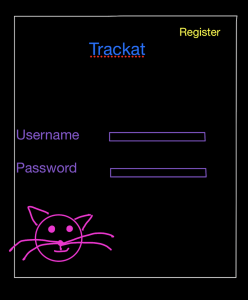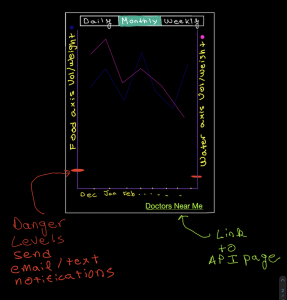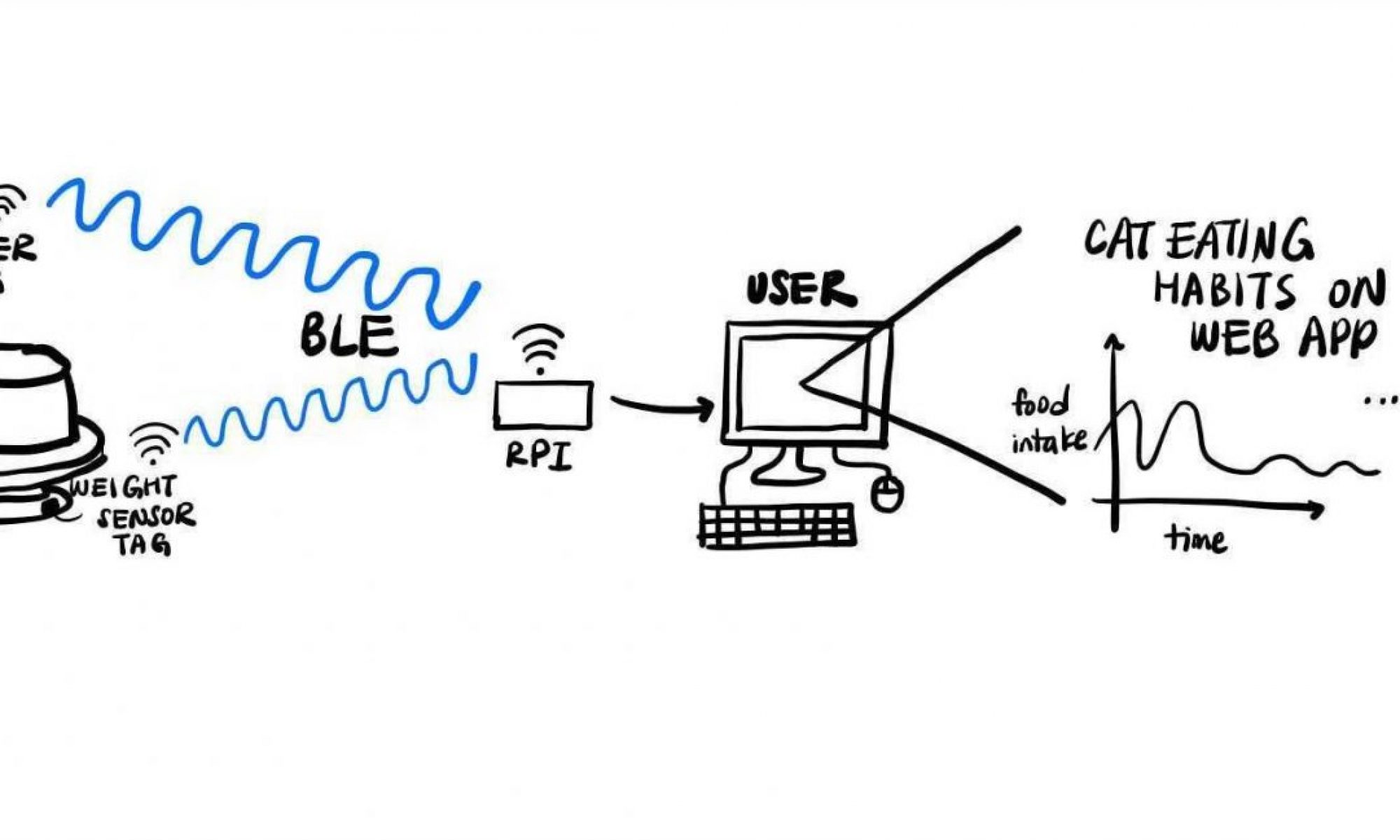
This Sunday, we did some prep work for the presentation that was on Monday. We finished up deciding on all of our requirements, by thinking about being a cat owner and what they would need. We also polished up the slides, which Lucas presented on Monday. I helped out a with designing the slides as well as input as a cat owner and re-doing the hand-drawn diagrams and was responsible for testing & verification slides, gantt chart, and the division of tasks/labor slides.
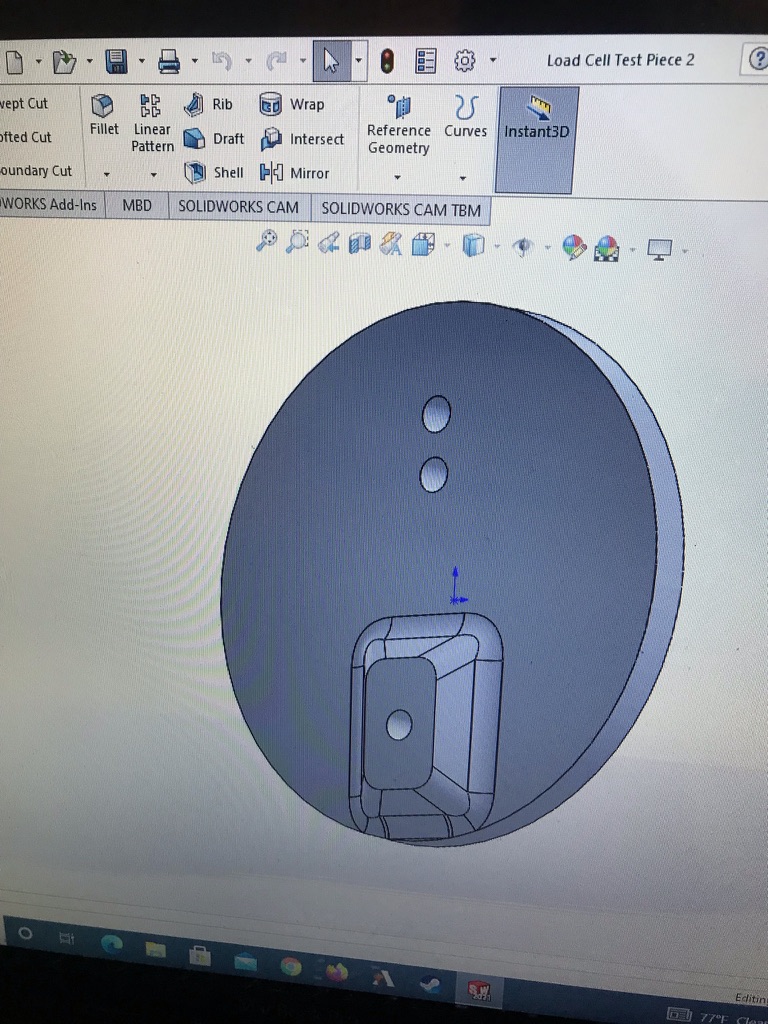
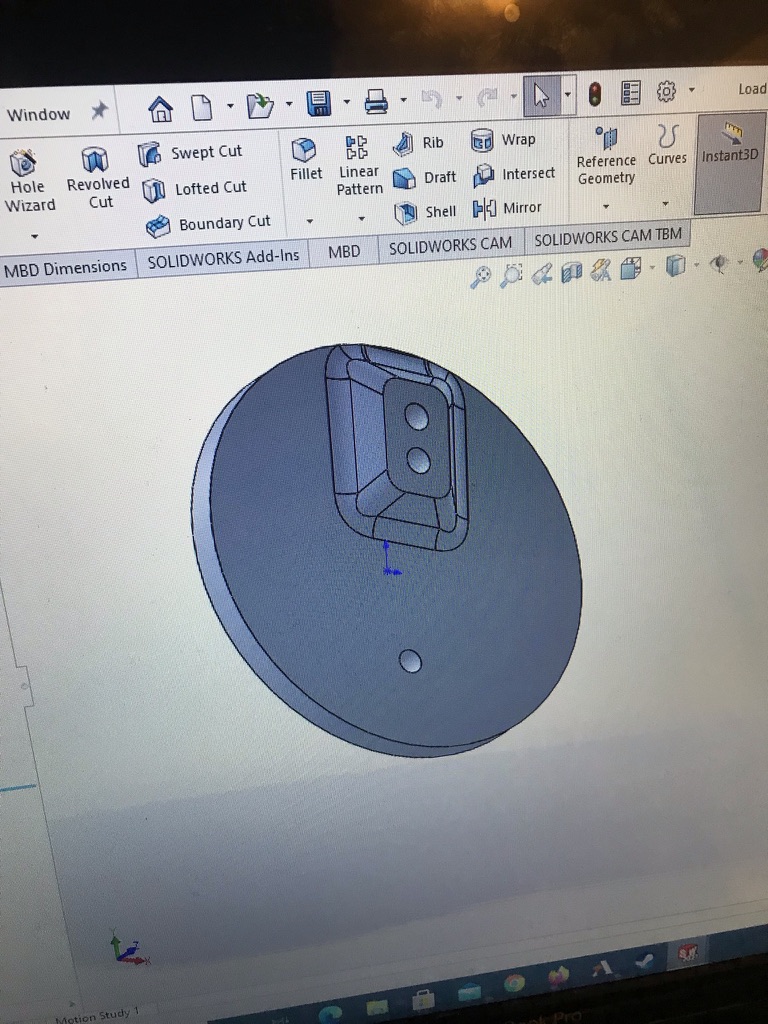
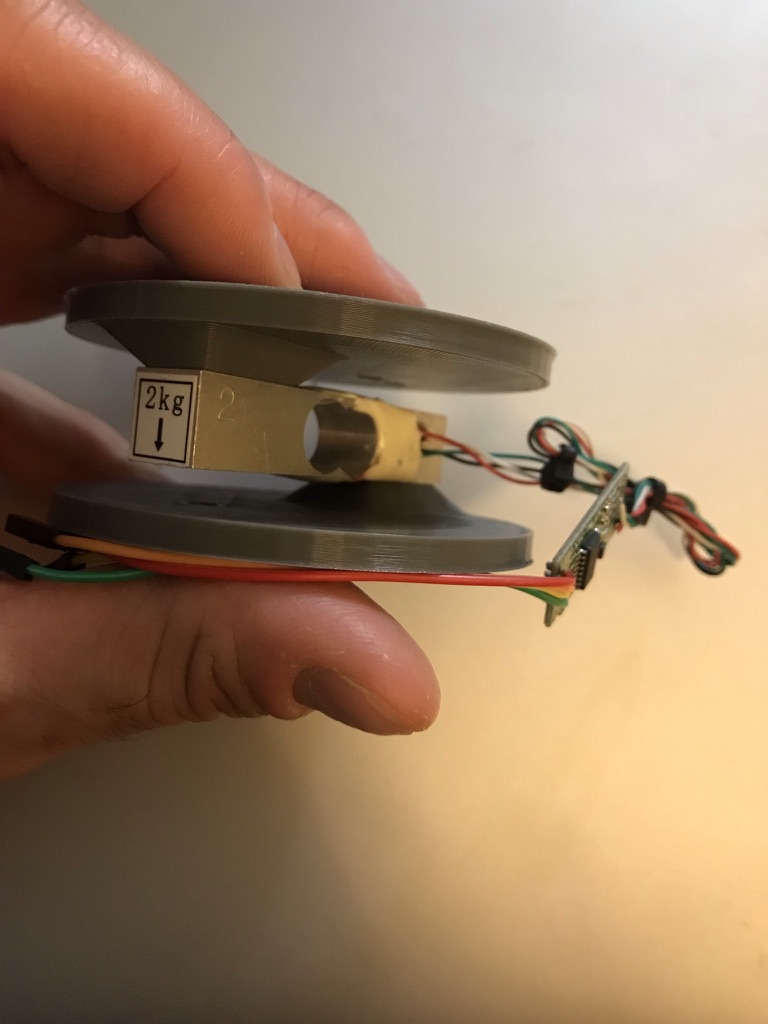
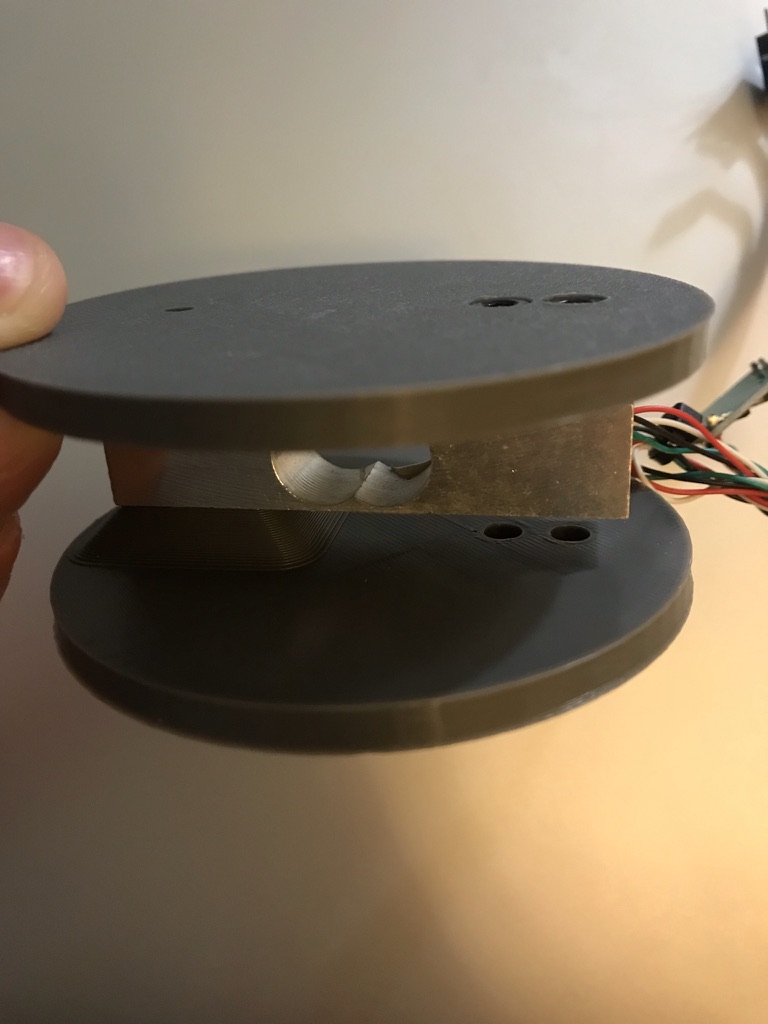
We also met up after class to start setting up the raspberry pi and also Lucas and I started taking a look at the robocat one more time. Because the pieces were messed up, we decided to reprint those pieces.
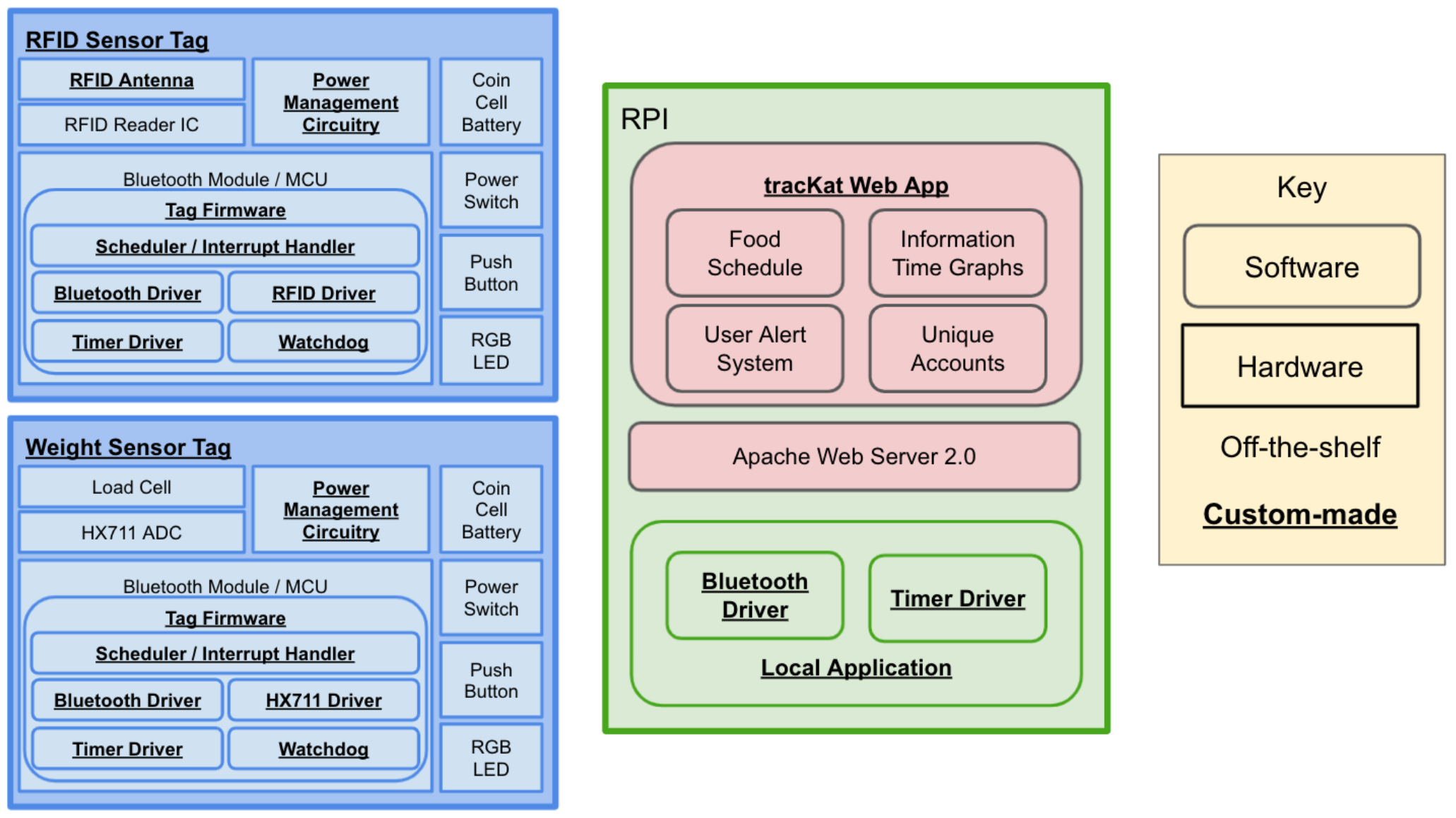
Lastly, I’ve been doing lots of research this week on how to use the bluetooth on the raspberry pi, and looked at ble5, and how to setup the rasbpi the way I want to. Tarush and I will be finishing up setting up the pi in the lab tomorrow and I will be initializing setup for the bluetooth module as well. I’ve also thought through some hardware diagrams in order to receive interrupts or poll for inputs from the ble device (tags) and make threads to run each of these at once.