Hello World!
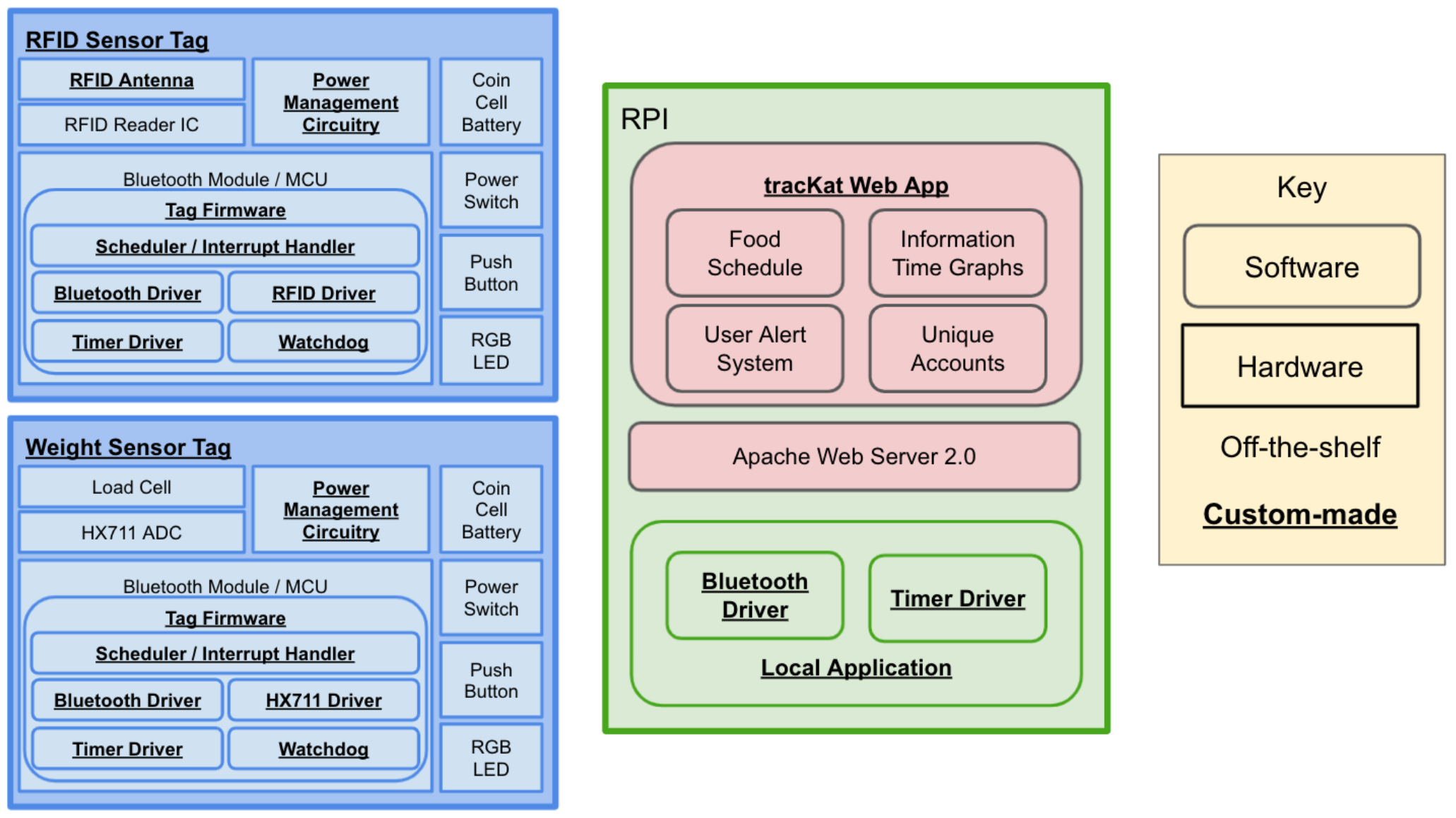
The main team goals for this week were to finalize technical requirements and write up course documentation (gantt chart schedule, proposal slide deck, website, etc.). I mainly worked on the solution approach, preliminary system diagrams, and technical requirements.
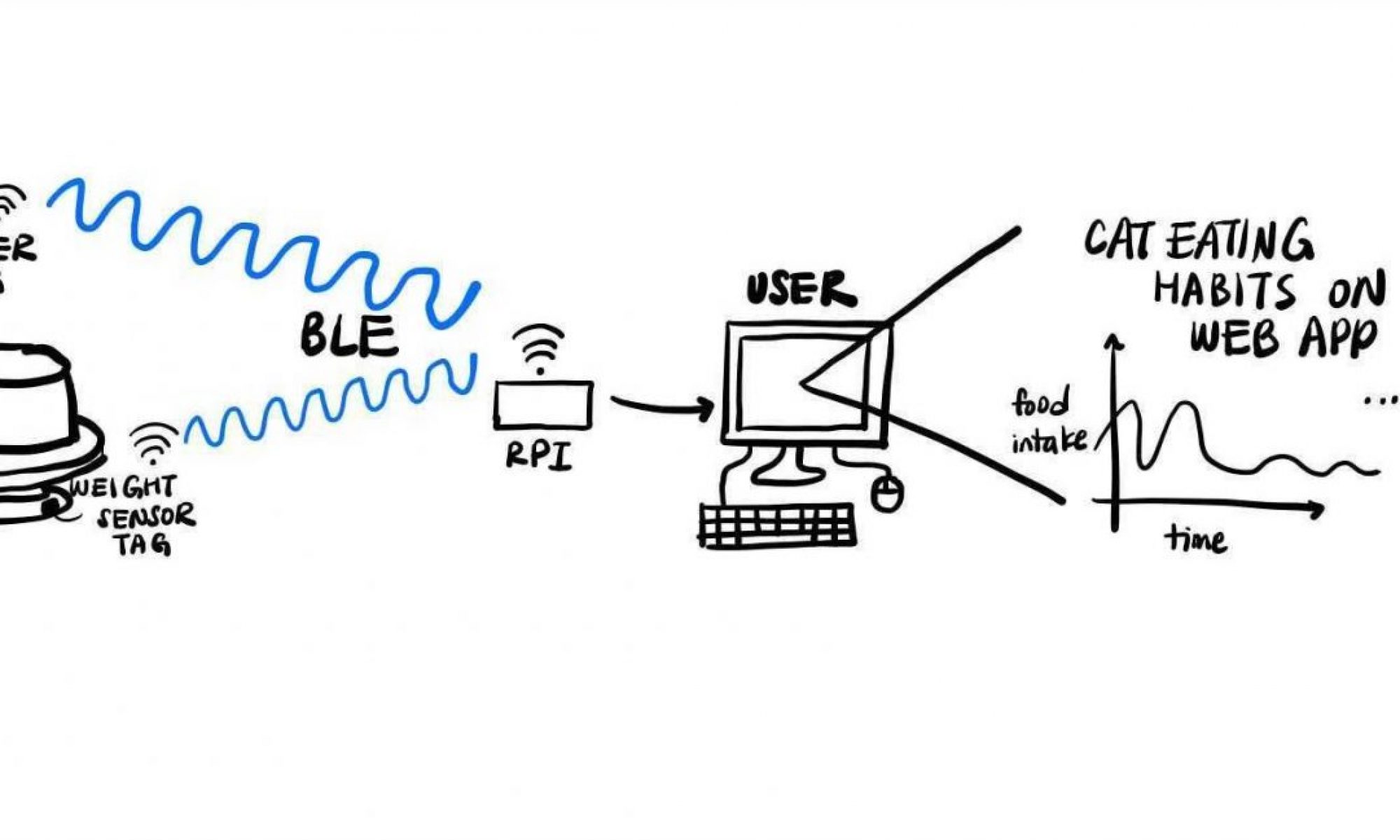
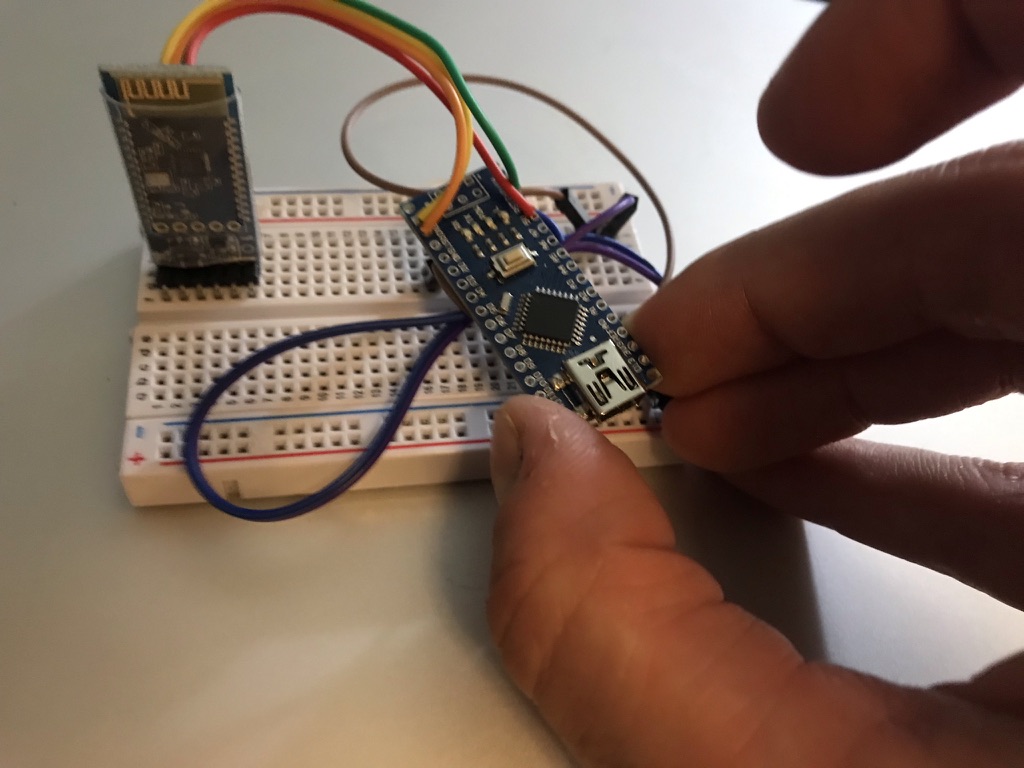
 I also researched BLE modules, RFID parts, and weight sensors, and worked with MeeDm to conduct a trade study of using BLE versus WiFi. We ultimately settled on the BLE standard because of its superior power consumption and reduced implementation complexity. I researched the benefits and trade-offs of sensing weight via load cells versus force sensitive resistors – for our use case, the much higher accuracy and granularity achievable with load cells makes them the clear choice.
I also researched BLE modules, RFID parts, and weight sensors, and worked with MeeDm to conduct a trade study of using BLE versus WiFi. We ultimately settled on the BLE standard because of its superior power consumption and reduced implementation complexity. I researched the benefits and trade-offs of sensing weight via load cells versus force sensitive resistors – for our use case, the much higher accuracy and granularity achievable with load cells makes them the clear choice.
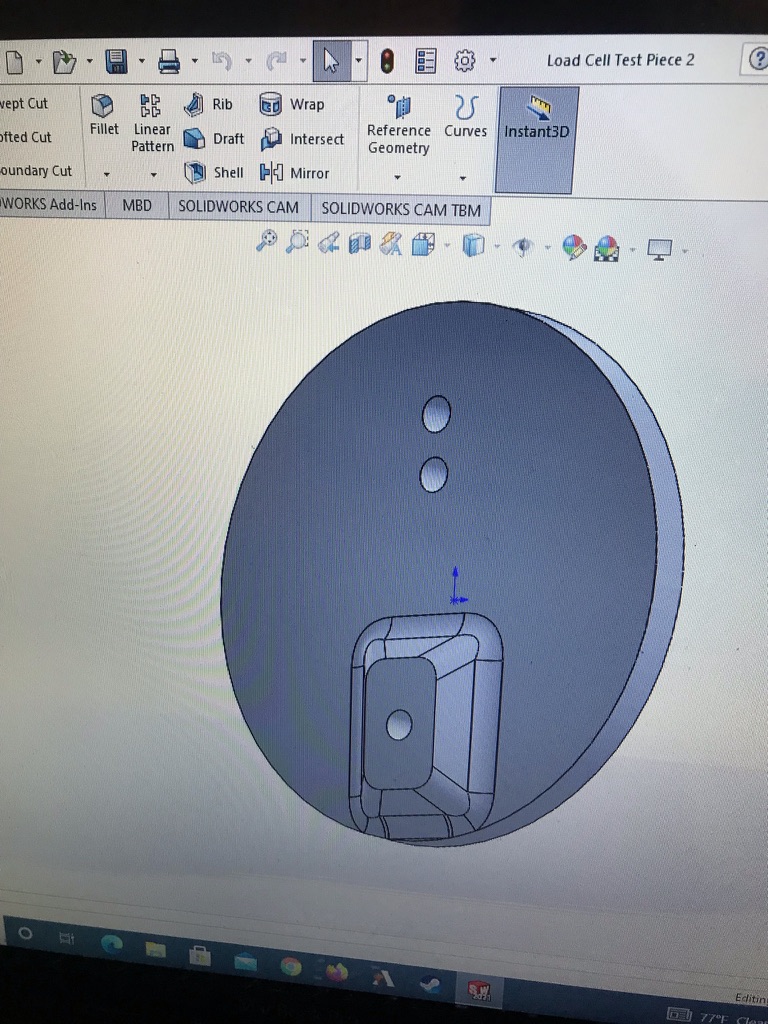
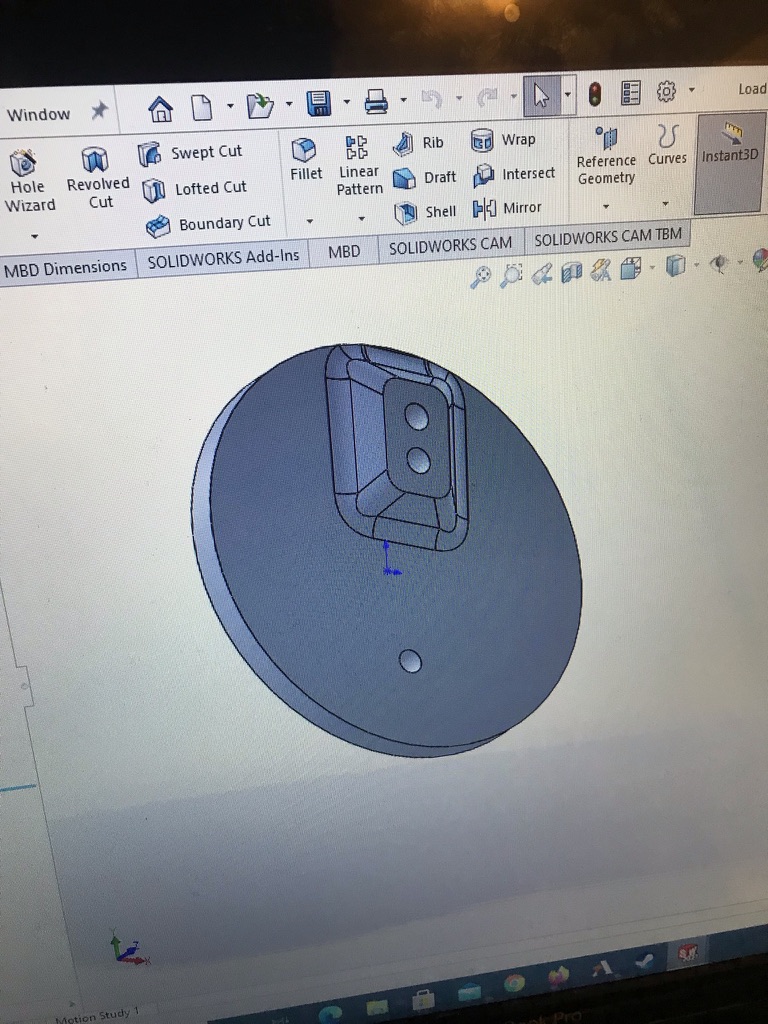
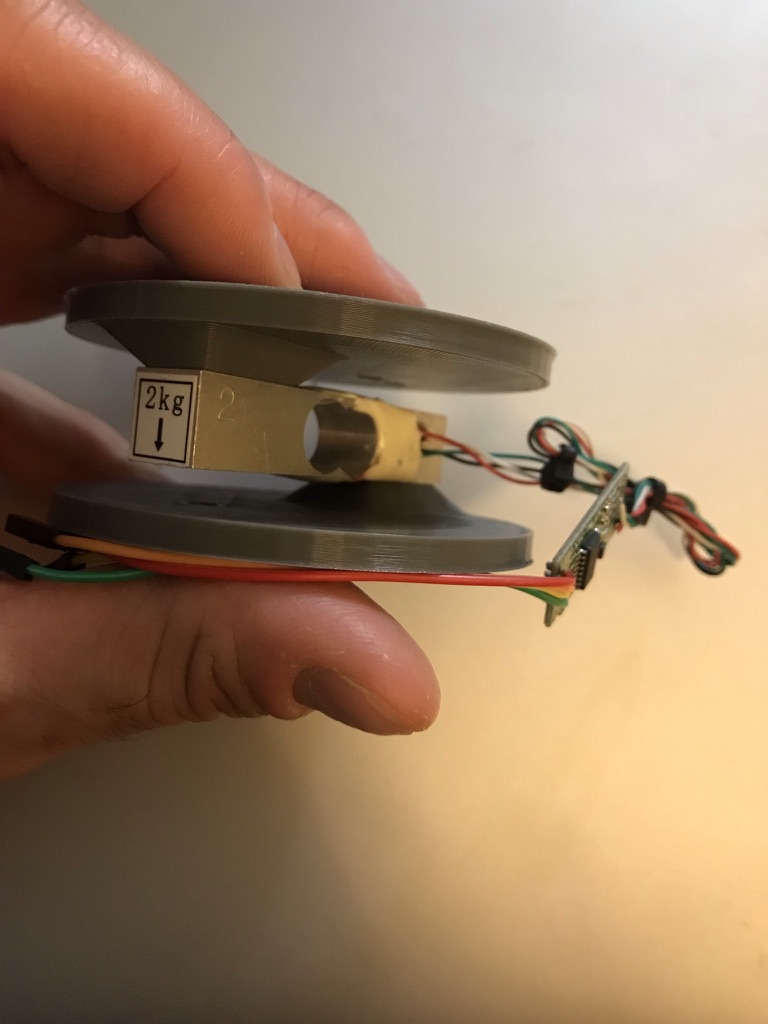
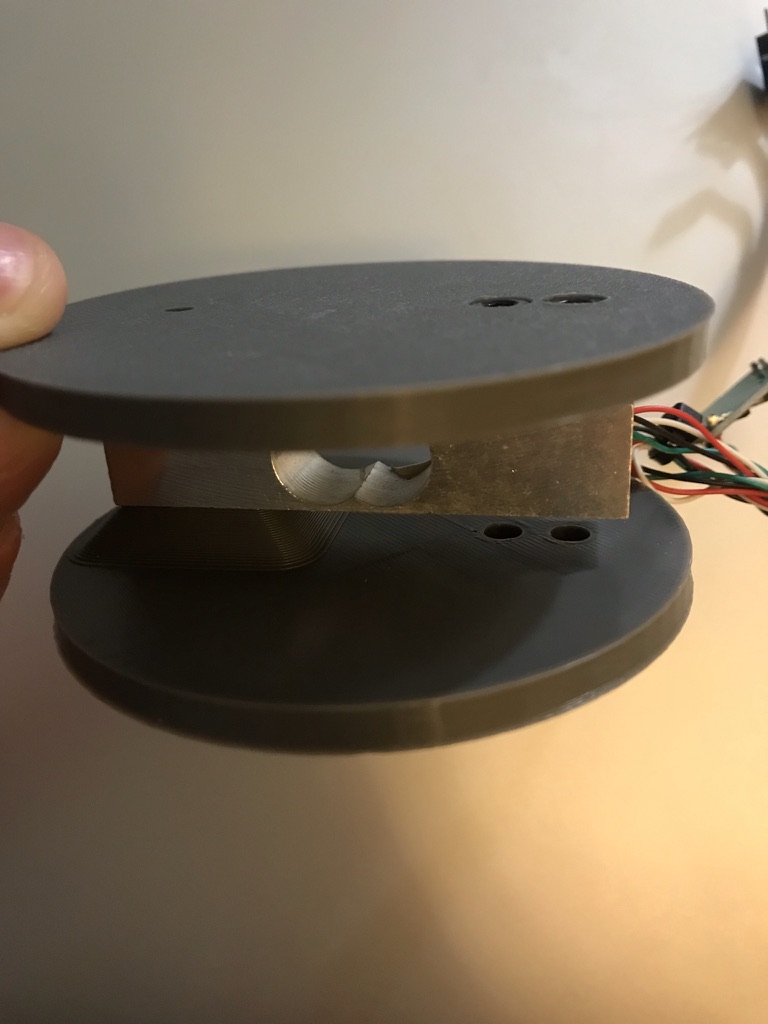
Throughout the week, I scrounged up free parts from the Robotics Club and Ideate Physical Computing Lab in order to spearhead getting a demo of our system running as fast as possible. I got basic RFID and weight sensing working with Arduino Unos and Nanos and will have Bluetooth ready early this upcoming week. I designed a simple load cell mount in Solidworks and 3D printed it, and will work on getting the whole demo together into a clean package this upcoming week.
Finally, our testing strategy initially assumed we would purchase a couple stuffed cats and implant them with RFID microchips. Instead, I ended up stumbling on Petoi, a company founded by some CMU grads. They made a project called OpenCat, an open source, Arduino based robot cat. Of course I had to print it out, and I found all the necessary parts (microcontroller, ultrasonic sensor, hobby servos, motor driver, and rf receiver) in RoboClub! Next week will see this pile of “managed chaos” transformed into our test cat, Shelley.