With the robot’s construction finalized, we focused on final touches and testing this week. We stared with our final integration test. This test would ensure that the addition of a basket didn’t adversely affect any other components of BallBot. To perform this test, we set up a testing environment in the capstone lab and sent BallBot through it. Below is a video of the result:
As one can see, the addition of the basket did not seem to negatively impact any of the existing systems. BallBot was successfully able to pick up all the tennis balls.
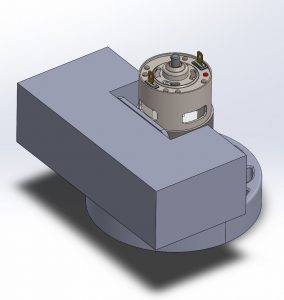
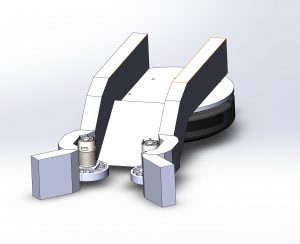
After verifying that our system fully integrates, we decided to remodel the top of the robot to incorporate a touchscreen displaying our user interface. In Solidworks, I revised the design to include another layer on top of our sensor suite to house the screen. The final CAD model of BallBot is shown below:
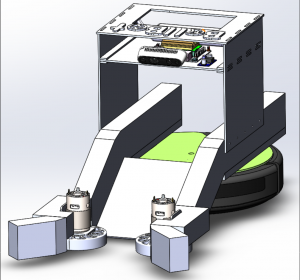
With the model finished, I cut the new layers out of acrylic and assembled + painted them in the lab. We attached the touch screen and hooked up the Nvidia Jetson Nano. At this point, the final physical construction of BallBot was complete. A picture of BallBot in its final form is shown below:

And here’s a video of the new and improved BallBot running through the same test from earlier:
BallBot was able to successfully pick up all but one of the tennis balls. Failure to scoop up the last tennis ball was due to a software bug, which has since been fixed.
For next week, I plan on working on the final presentation and video.