This week’s efforts have primarily been directed towards preparing for the demo. We have been undergoing integration of our various systems and contributions, and ran a few more complications in that field than we expected to find.
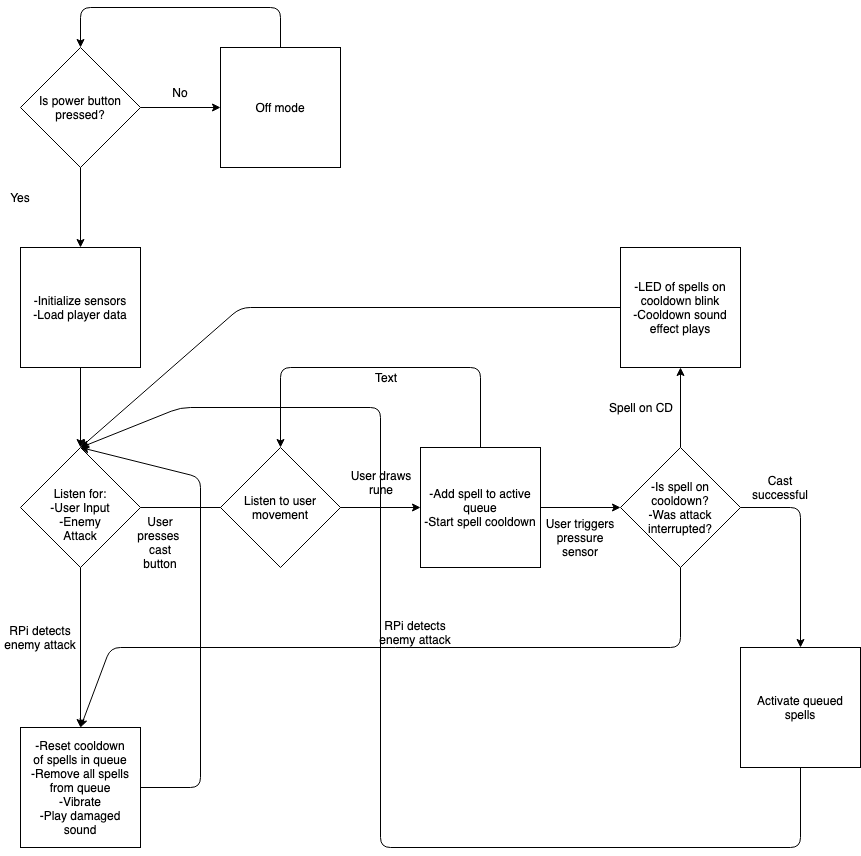
Our goal for the demo is to demonstrate the basic circuit, our game logic, and our spell processing code, which will take input from a few hardware buttons and from the IMU module once it has been debugged. We will use terminal output to demonstrate that our code logic works.
Our current target is to get a single staff working, but we are ramping up our efforts in the communication department, and will begin work on communication between staves and integration of the NRF24L01 chips. In the meantime we plan to use a team member’s spare RPi 2 until we can secure a second RPi 3 B+ either through the ECE program or through purchases.
On the code side, we have had a number of advances – our code has working forking and reaping of threads, our game flow logic is more developed, and we have more functions for processing data being handled to the main loop from other modules, namely the IMU module. Core data structures include our spell payload (an array containing the spells cast), which will be sent via comm line to the partner staff, which then executes the contained spell on itself, and an internal struct containing a list of our various spell effects and severities. Our sound player is mostly done, but there are still a few bugs left to root out before it performs as desired consistently.
The IMU motion classification module has had issue with accurately categorizing motions. We took measures to try to mitigate this issue – using the GNU Scientific Library to integrate, ensuring minimum movement lengths are respected – but these will unfortunately not be ready by the time we have to demo.
We additionally had a few unexpected hardware issues – the SD card we had been using with the RPi appears to have broken. Various partition management programs have only been able to locate 30 MB of RAW format space on the SD card when it should have 8 GB of space. After extensive attempts to find information on the issue and repair it via software, we have come to the conclusion that the card has to be replaced. On the bright side, that replacement SD card is currently on the way, so debugging efforts shall resume soon.
Various unforeseen bugs related to running code on the RPi, including a fair number of errors on our part, delayed our physical integration process, and we are unfortunately behind schedule on this front.
We also realized that both the NRF24L01 communication chip and the display screen we had planned to use needed the Serial Peripheral Interface (SPI) to operate. We have begun a search for a replacement screen of a comparable size (3.5 inches) that uses the built-in display port on the RPi 3 B+ rather than the GPIO pins, but that search has yet to yield rewards. On the other hand, we have identified a shock switch that we can order, integrate, and test to fill the role that we once expected the pressure sensor to fill.