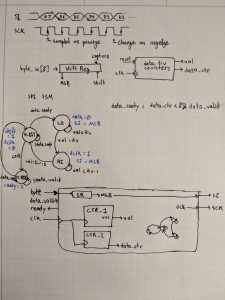
This week I’ve looked into the display driver and FFT more. I’ve tried to compile and run the FFT IP, but haven’t got it working. For the display driver, I’ve begun planning out its verilog implementation and looking at the controller datasheet. The display driver has a simple SPI interface with a few other pins that indicate if we are performing reads or writes and instructions or data. I’ve considered adding a FIFO to make the hardware design of the controller easier, but it doesn’t seem very necessary. The control FSM can be designed such that it only sends data when the hardware driver is ready. Here is my planning document for the display driver so far: