Abstract
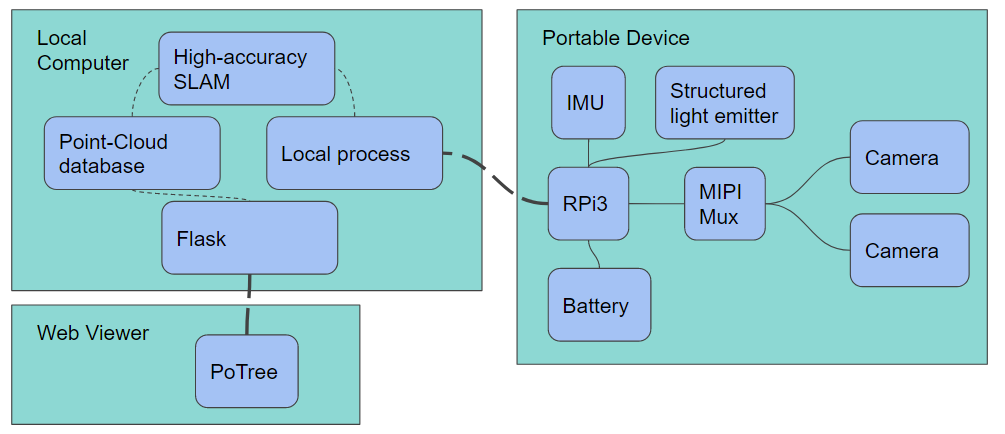
We're creating a portable device which can perform 3D
localization and mapping to gather the 3D model of a
room and import it into a VR or AR application. Given
an indoor area, the device will perform 3D
localization/mapping on-board, and will reroute the
gathered information off-board to a local computer to
run SLAM and generate a more accurate 3D
representation of the room.
Below is the System-level diagram.
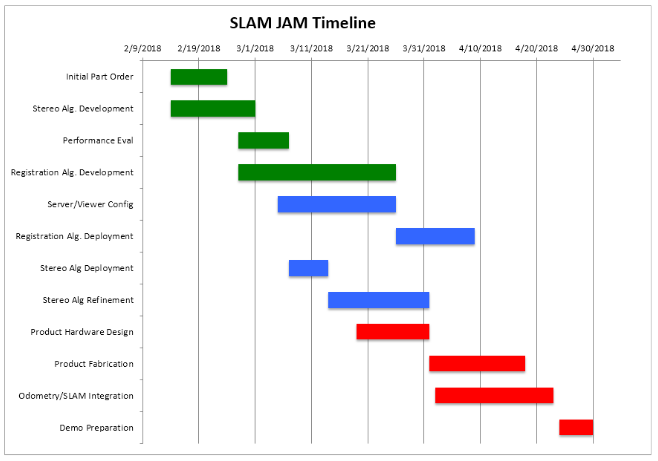
Schedule
Below details the schedule we have set for ourselves and our project.
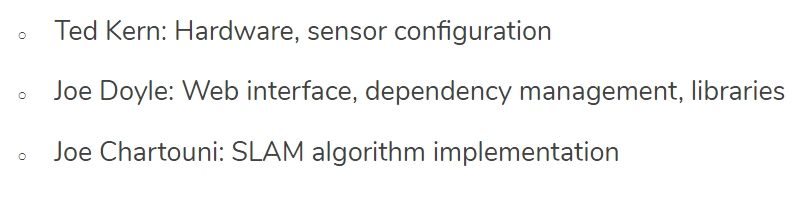
Work Distribution
Below details the members of the group assigned to specific tasks.