Significant risks and risk management:
Risk: The analog circuit can’t meet the required tolerances
Definition: This risk has been brought to our attention by our assigned in instructor Thomas Sullivan (Thanks!). It is currently unclear to us what tolerance the analog components will need to have in order to satisfy the 10% solution accuracy required by the accuracy requirement (NR3). This is nontrivial to determine as the accuracy of the whole circuit can’t be easily associated with the accuracy of individual components.
Severity: If the analog circuit can’t meet the required tolerances, the progress of the whole project would be severely jeopardized, because the accuracy requirement (NR3) would not be satisfied.
Resolution: A solution is to use Sergey’s work [1] as a reference. If our components are more accurate than Sergey’s components in every relevant measure, it is likely that the whole circuit wouldn’t be significantly worse in accuracy compared to his circuit. This is possible because more accurate components are available since his work was published.
Current progress:
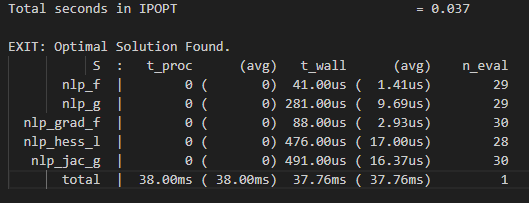
We have completed P2, and is currently working towards P1 and P3. We performed some benchmarking on P2, with results showing that the majority of the time spent in the solver is on the QP subproblem(32ms out of 38ms). This means that if we solve the QP subproblem with our analog solver we can potentially get large speed up.
Changes to the existing design:
There are no changes to the existing design. We have completed P2 successfully, indicating that we can proceed with our existing design.
Changes to the project schedule:
Similarly, there are no significant changes to the project schedule.