Significant Risks
This week we were able to successfully implement usage of the IMU along with the rest of the localization system, so we are able to constantly display the user’s rotation data along with the user’s position. We were also able to test the localization system in a larger area somewhat similar to the space in the Wiegand Gym to make sure the tag would be able to read the distances between it and each of the anchors. The testing was mostly positive: although the range of the tag and anchor is approximately 34 meters (connectivity beyond this range is still possible, though insufficiently consistent for our localization system), in practice, practice, the range of the device seems to be a little more inconsistent at a range of around 25 meters. The firmware of the tag attempts to switch to connecting to a different anchor if any packets are dropped between the tag and the anchor, and this may happen at a greater frequency at ranges greater than 25 meters, which can cause the anchor connections to become less stable. However, this testing does show that placing anchors in a denser fashion improves the stability of its connections in the network. In conclusion, this week we were able to resolve the outstanding deliverables we had promised to implement as a part of our project.
Changes to System Design
We incorporated the IMU into our localization system this week to display the rotation/heading of the user on our map. This was largely successful; hence there were no system design changes required.
Schedule
This next week our team will be primarily working on the final deliverables for the project. We also aim to do some further testing (optimistically in the Wiegand Gym itself if we can enter at a time where the basketball activity on the courts is not especially high). We will also work on our presentation for demo day.
Progress:
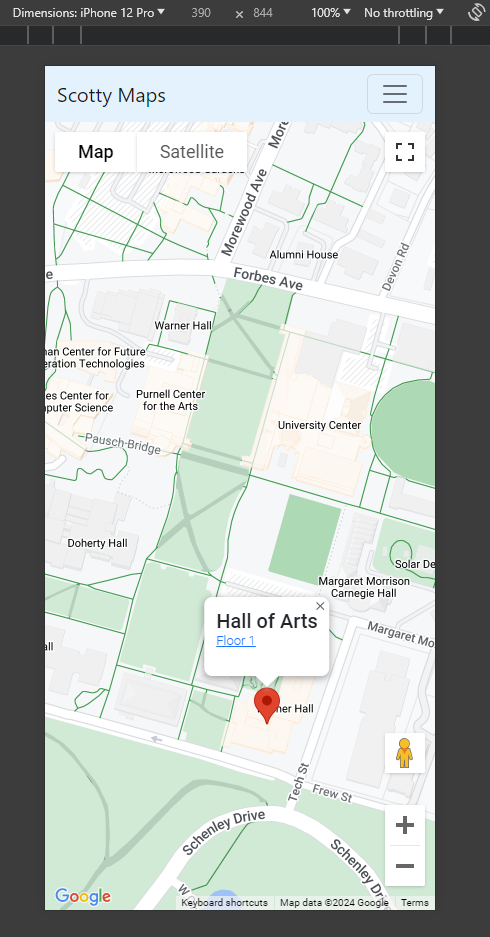
The video below displays the capabilities of the authentication system, with the user being directed to create a new account, as well as being able to edit some aspects of their account and sign out using a profile page.
This Week’s Prompt:
Unit tests:
- Range of the anchors and tag. This was done to ensure that the maximum range of communication is sufficiently large enough so that installation of the system would not be excessively expensive. Our target goal was 25 meters. We measured the furthest distance in a hallway such that our tag could still read distances from an anchor and found that this distance was around 34 meters. This met the test, and so we did not need to change our anchor placement strategy.
- Distance measurement accuracy between an anchor and a tag. How much does distance measurement actually differ between an anchor and a tag? Our target goal was 0.23 meters (the rationale of this number comes from the maximum change in distance in a typical 25×2 meter hallway to cause the localization error from multilateration to differ by 1 meter). The actual observed distance error as measured by taking an average of 10 readings is 0.15 meters, which passes the test. These numbers reveal the localization system is theoretically capable of highly accurate localization.
- Localization Accuracy of the localization system. We compared the average predicted position of the localization system with the actual position we were standing in a hallway and find that the average misprediction distance was approximately 0.2 meters (1 measurement taken in 2-meter increments over a 20 meter stretch of hallway). We tested the difference between using a trilateration and multilateration algorithm on localization accuracy. Overall, both are competitive. However, due to the behavior of the DWM1001’s to sometimes fluctuate from inside of a hallway, we find that the multilateration can improve accuracy by approximately 0.1 meters. These numbers meet our goal of <1 meter accuracy and are sufficient in accurately tracking a student.
- Localization Precision: We want to ensure the predicted user’s position does not sporadically jump on the screen. We stood in a location and measured the frequency/distance of jumps we would see in the localization system. We notice the maximum fluctuations were approximately 2.1 meters, which was larger than the 0.5 meter goal. Because of this, we designed a filter for the final position estimate, that uses the change in estimated position over time to calculate our velocity, and rejects data points that would imply a velocity higher than some maximum (which we specified to be 2m/s).
- Heading Accuracy: We want to make sure the difference in the angle of the user’s estimated orientation aligned with that of reality. To test this, we walked along the hallway, rotating around, before stopping at parallel angles with the hallway (in real life) before comparing the result to that of what was seen on the browser. We took the difference between that angle and the actual angle. The average result over 15 trials reveal the average difference in angle is 20 degrees. This aligns with our goal of 20 degrees.
- Battery life of tag: We tested the battery life of the system by running the raspberry pi with the localization system constantly running. Our battery life lasts for at least 10 hours, which beats our desired goal of 4 hours.
- Position Update Latency: We measure the latency of our multilateration and nelder-mead algorithm and find it is on average 20 ms, which is sufficiently less than the goal of 500 ms to make sure that the latency of the algorithm is fast enough for fast update frequency.
- Distance update frequency: We measure the frequency at which the tag can get values from anchors and find this value is 10.1 Hz. This reveals our localization system can easily provide frequent updates for the user’s position (as long as other factors are not bottlenecking the process).
- Tag to Webapp Latency: We find that the latency of communication between the user’s Raspberry Pi and the server is on average around 225 ms. However, this best case condition relied on the server processing many packets at once (which in some cases it cannot keep up) so we ended up switching to using Websockets, which decreased our average time to 67 ms. Due to our navigation system not requiring incredibly fast latency to avoid disorientation, we find that this is sufficiently fast enough to provide timely updates. Particularly, we learn that this latency makes the rotation update frequency run on the RPi in a fluid manner.
- Total Latency: We measure the total latency between user movement (e.g. past a door) and it being shown on the web application to have an average delay of around 0.84 seconds. We believe this sufficiently in preventing a user from getting lost.
- Navigation Algorithm: We benchmark the speed up the navigation algorithm and find that it produces results in an average of 125 ms, which is sufficiently fast to provide the user with instructions when they are using the application.
- User Experience: We surveyed 4 of our potential clients (students whom were unfamiliar with a building) to use our application to navigate to a specific room. We asked them to fill a quick survey to gather some of their feedback, using the qualitative feedback to improve some aspects of the webserver’s user interface. The user’s quantitative rating of the clarity and helpfulness of the directions was a 4.5/5.0.