For this week, I completed multiple tasks including the assembly of the glove and the start of the sensor tests. We had the glove with sensor casings that we 3D printed last week. Since the glove was ready, I soldered the Micro onto a prototype board. This was a challenge as it was my first time soldering onto a protoboard. Unlike traditional motherboards, each hole in the board is connected to the other in some way. Due to this reason, I had to strategically think of a design to connect multiple wires to a single Micro pin. Also, the size of the protoboard was set beforehand because of the casing on the glove. This made the process a lot more difficult as I had to consider the method by which the wires will be connected to the sensors. Below is a photo of the back of the soldered protoboard. 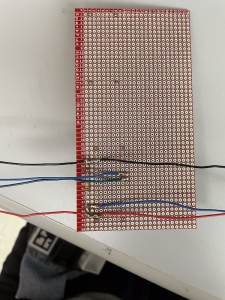
I made holes on the sides of the Micro casing that allowed wires to be connected to each sensor. Since there are multiple wires going through these holes, I used a heat shrink tube to make the wires look like a single cable. For attaching the pressure sensor to the glove’s fingertip, I decided to use electrical tape for now. During my trial of using super glue to attach the sensor, I noticed that the sensor didn’t work. I think the cause of this problem was the chemical reaction between the superglue and the film cover of the pressure sensor. Below is a photo of the assembled glove.
I am a little behind schedule as I still need to work on refining the accelerometer/gyroscope data. Our team noticed that the complementary filter used for rotational data calculation didn’t work during the three-way integration of our system. For the upcoming week, I will be spending most of my time finalizing the stability of sensor data processing. Also, I will be going into the lab tomorrow to perform tests on the sensors. While preparing for the Final presentation slides, I came up with metric goals for each sensor test. I will most likely focus on acquiring test results for the rotational and velocity data. Then, the test for the pressure sensor will follow.