Risks and Contingencies
- The RFID latency is an issue we must solve. We are looking into either improving the size of our tags or finding a higher performance RFID reader.
- Shakiness of the camera feed is an issue. We are looking into ways to counterbalance the camera while it drives.
- The motors don’t appear to be as fine tunable as we thought. We are having issues turning the cars, and driving in reverse. We need to look into porting our current code base for the motors into a language that actually supports multi-threading.
Changes to Design
- Dropped Vuforia from project entirely.
- Decided that it is too late to design a PCB.
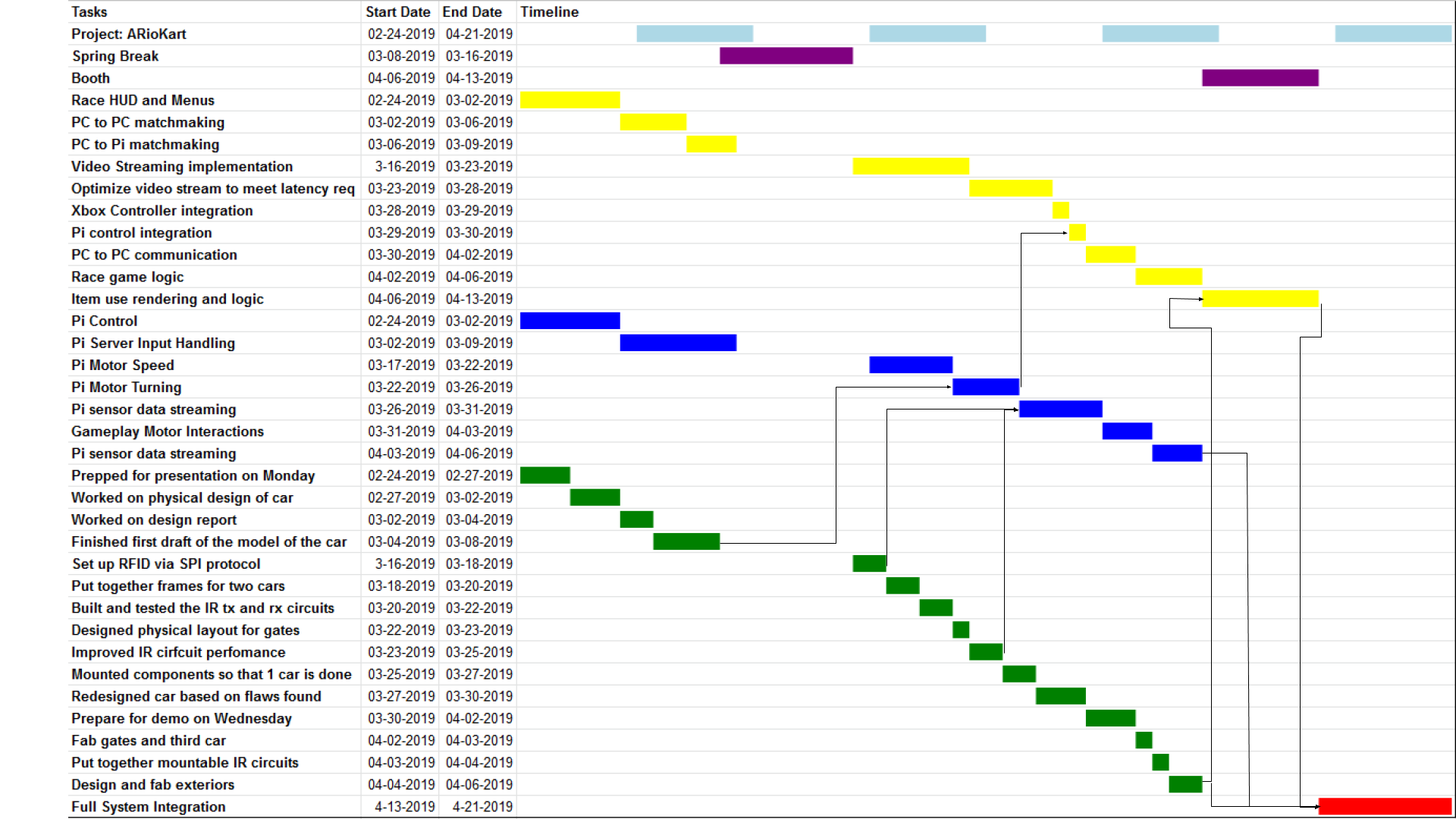
Schedule Update
- We have an updated schedule that we put together for the midpoint demo:
Team Status Report: Week 7