
This week, I focused on integration tasks to prepare the system for the demo. Here’s what I accomplished:
This week’s progress:
- Jetson and Adafruit UART Integration
- Worked with Kapil to implement UART communication between the Jetson and Adafruit
- Helped write, run, and debug the code required to communicate via the Jetson’s UART pins.
- Created and executed test scripts for this communication, eventually achieving functionality with the output of the model.
- Model Deployment on Jetson
- Resolved compatibility challenges related to leveraging the Jetson’s GPU for efficient model execution.
- Successfully installed the necessary packages and verified the model running in real-time using a webcam.
- System Integration
- Made changes to the model to integrate it with the API and UART communication, ensuring smooth output transmission.
- Finalized the Jetson setup for the demo: the model now runs locally on the Jetson and transmits outputs as specified in the project write-up.
Goals for Next Week:
- Collaborate with Kapil on Bluetooth integration between the Jetson and the bracelet/Adafruit.
- Work with Noah to improve the model’s efficiency and reduce latency.
- Conduct tests for API latency to ensure real-time responsiveness.
- Begin user and user experience testing to evaluate the system’s performance and usability.
I’d say we’re on track and I feel good about the state of our project going into the demo on Monday.
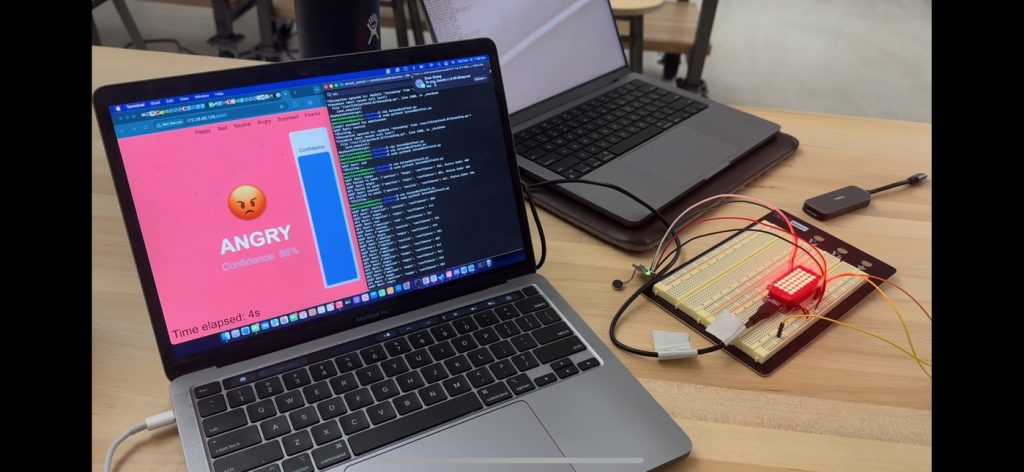
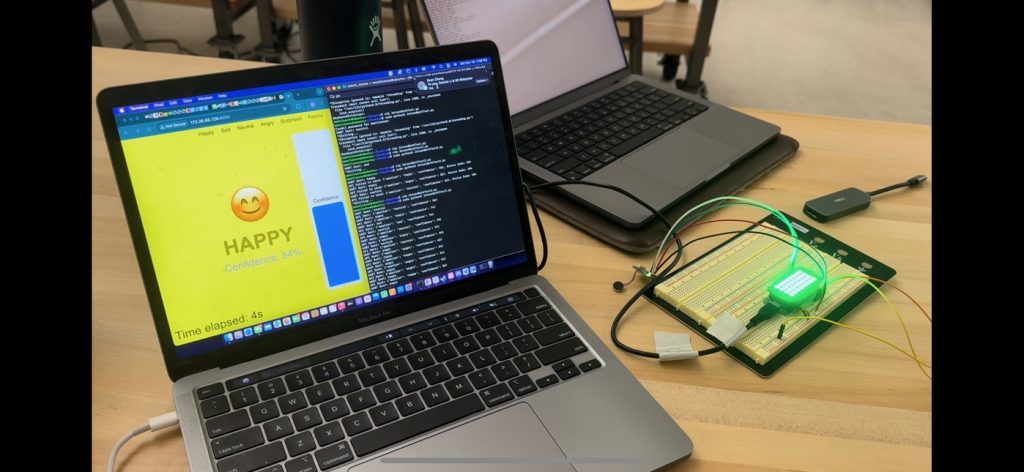
UART (bracelet) working alongside API (iPad):
I forgot to capture photos of the model on Jetson/whole system in action.