This week, I focused on finalizing and testing key system components in preparation for our final presentation. Specifically, I worked on the following:
- System Testing and Validation
- Collaborated with the team to conduct tests on the project, gathering critical information on use-case and design requirements for the final presentation
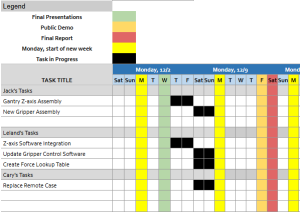
- Made a New Gantt Chart
- This outlines the final tasks we have planned and when we plan to do them
- Researching Camera Latency
- During testing this week, we measured a lot of latency from the camera capturing frames and performing OpenCV calculations. We measured latency through video taping which had some human error. I did some research online to measure CV latency directly in software
https://www.dlology.com/blog/how-to-measure-the-latency-of-a-webcam-with-opencv/
- I also found official OpenCV documentation for measuring performance and possible optimizations I could use to reduce latency
https://docs.opencv.org/4.x/dc/d71/tutorial_py_optimization.html
Project Status
I am currently on track to meet the project timeline. I have high expectations for how our final presentation will go. I’m also confident in the team completing the rest of our tasks, as we planned in the Gantt chart.
Goals for Next Week
- Update the current main project script to include Z-axis computations and send Z-axis commands to the Gantry system
- Create the force lookup table. I will create the table by squeezing objects with the gripper and measuring the distance of compression of the foam on the gripper and the force the gripper is exuding on the object
- Update the gripper control software such that the gripper will squeeze with variable force instead of binary open or close
New Knowledge and Learning Strategies
The most important knowledge I learned for the part of the project I worked on was the OpenCV library, as this is the crux of the camera system. The hardest part was working with the software that was available for the camera I picked out. The majority of time I spent on the project was with my teammates because system integration was a big challenge. I learned a lot from my teammates, as I had to understand their parts of the project to debug our system implementation.
I primarily searched online to find forums or documentation on problems I ran into or questions I had. However, I would say I learned the most through my teammates.
