
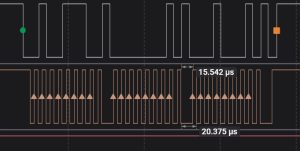
This week my work has been focused on following up on the progress of parts procurement and driver development for the motor controllers. I worked on the TB6600, a motor controller. My current design is to connect the + and – terminals of the motor controller to the motor and use the Jetson GPIOs to connect the Pulse, Direction, and Enable terminals of the controller and then use the Jetson.GPIO library to control the motor controller. This week I finished writing the original code and successfully ran it on the Jetson. I used a digital logic analyzer to analyze the waveforms of the GPIO pins to make sure they were working properly. Next week when the controllers and motors arrive, I will start working on the hardware connections to actually use the Jetson to control the motors and add a second controller for full power load experiments.
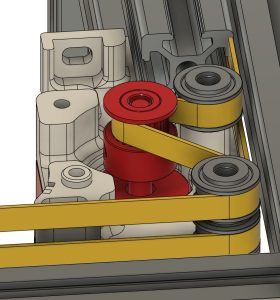
Meanwhile, this week I’ve been working on the precision design of the mechanical hardware. I designed some 3D printed parts such as supports to hold motors and fixed and moving pulleys for the gantry system. We plan to start 3D printing parts next week to ensure the mechanical stability and viability of the whole system.
We submitted our purchase request two weeks ago, and since most of our purchases come from Amazon, I expect that we should receive most of our parts next week. Next week we will be working on building and field testing the hardware. I plan to spend some time completing the aluminum frame build and basic experimentation with the gantry system.