
Due to an unforeseen procurement issue, we were not able to obtain the aluminum profiles and motors and accessories needed to build our gantry system as planned this week, so we were not able to begin assembling our system. So this week I spent my time mostly on the parts that didn’t require physical hardware.
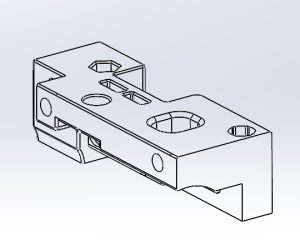
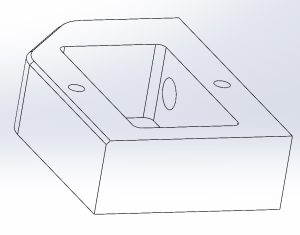
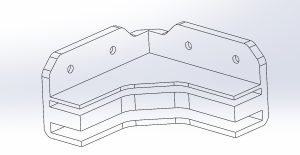
This week I further refined the CAD modeling and simulation, and following up on last week’s design of the motor support structure, this week our motors were able to be fixed in their designated positions and function properly in the type of environment we were working in. I fabricated the motor support structure at Roboclub using a 3D printer, however because of the slicing problem. Our parts were not able to reach the hardness we needed during testing, so next week we need to continue 3D printing to get a strong enough motor mount.
Carrying on from last week’s motor controller development, I wiring the Jetson Orin Nano this week, there was some difficulty with the pin assignments as we have more peripherals, however as the motor driver only needs analog signals we assigned it to a few free pins. It was tested by a logic analyzer and it works properly.
We have been notified of the arrival of our hardware this Friday afternoon, and next week we hope to finish connecting and debugging the motor controllers and attempt to begin building and debugging the gantry system.