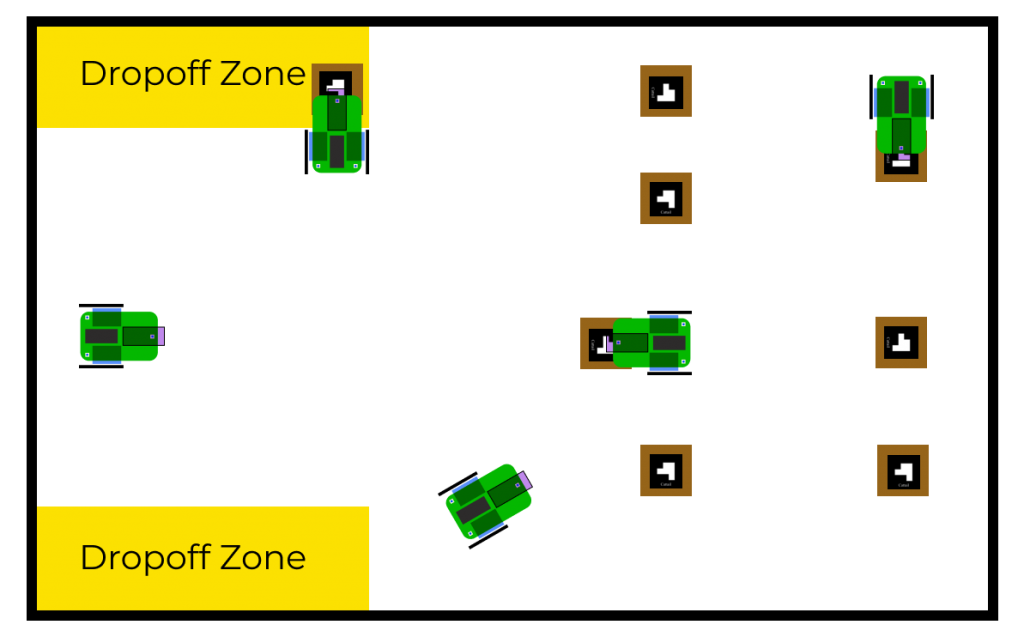
Warehouse optimization is an incredibly tough challenge that the largest companies deal with. Companies like Amazon, Walmart, and Costco all have warehouses where trucks need to be filled intelligently with packages from various locations on the warehouse floor. This intelligent packing problem in industry has attracted people to apply swarm robotics techniques to speed up packing trucks to improve warehouse efficiency. For our project, we intend to replicate this packing scenario at a smaller scale to demonstrate the feasibility of these techniques. We will have a warehouse with metallic pallets placed in various locations. There will also be designated drop-off locations where the robots must deliver the pallets. There will be several battery-powered robots on the field with the ability to drive around and pick/drop pallets. Finally, there will be a main computer with an attached camera that must keep track of the positions of each robot and pallet, as well as coordinate the movements of the robots using a multi-agent motion planning algorithm. Our main requirement is that the robots must be able to collaboratively move all the pallets from their location to specified goals as efficiently as possible and without colliding with each other. We expect a speedup in the amount of time taken to move all the pallets with multiple robots working compared to one.