

Following up on last week, Emily and I did agree to use the communication format mentioned in my last status report to communicate between the LEDs and the SP code and a function to handle this transformation and combine data from two sensors was implemented. It also turned out that the data collected from the top of the East Campus garage was very hard to analyze, I believe largely due to the fact that a metal guard rail was running next to us during the entire time of testing. To get a new data set, Emily and I took some stationary measurements in a turnaround in Schenley Park (see picture).

This data was clearer, but worrying, and a simplified summary can be seen in the following chart.
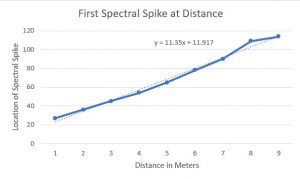
The y = 11.35x + 11.917 equation gives a to predict the location (index) in the spectral line data in which the first peak occurs at x meters from the car. This is worrying for two reasons. The manufacture specifications indicate that a peak one spectral line index later should be 0.126m further away which would correspond to a slope above of about 8. The slope of 11.35 means that the distance between each spectral line index is only 0.088m. With 126 spectral lines this would mean we would only expect our maximum range to be 11.1 meters, but the relatively high y intercept when means that for y = 126, we really only see a max range of 10m. We plan to, in the lab on money, use a multimeter to measure the current being pulled by the sensor from the arduino to see if we are providing enough power. I would also note that all measured testing thus far has been done with one of the sensors, so it might make sense to see if this range problem exists with the second sensor as well. Theoretically, from the manufacturer, we should be able to get a range of about 20m. It is possible that the y intercept problem is introduced by us measuring from the license plate of the car while the larger metal engine block is slightly recessed, though this wouldn’t affect slope. All of the above calculations are made using the spectral lines since they are necessary for multiple object detection and are what our code uses, but I also plan to look at the 16bit distance data, though a cursory look does not seem to present an any more promising story. I am also curious, the Emily and I stopped recording data once it fell off the spectral lines, if the distance data would track for the latter half of the 20m.