This week we were able to successfully deliver our presentation, and soon after that we received feedback about some aspects of our technical design, particularly our choice of a rotating LiDAR to be used in outdoor conditions.
We had discussions as a team and, factoring in feedback from the professor and the TAs, started taking the idea of static sensor arrays more seriously, and I came up with some possible solutions that will enable us to satisfy our sensing requirements with much more reliable and long-range sensors.
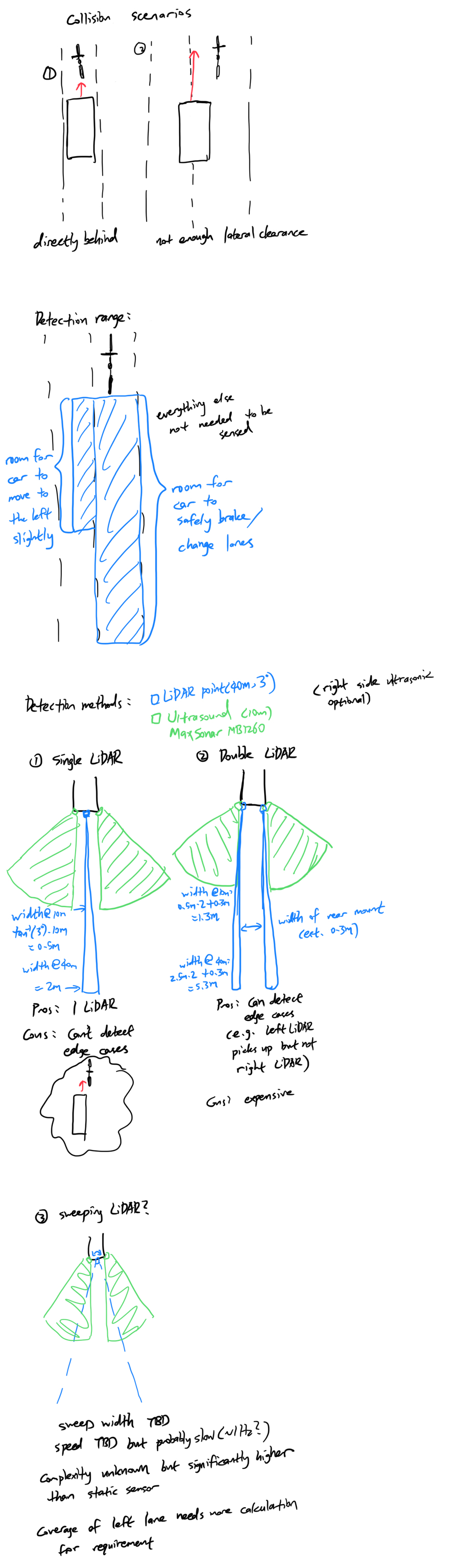
I thought the biggest challenge using static sensors is losing resolution, however, running through some scenarios, I discovered that, since cars are quite large, we can safely assume that the closest object to our sensors would be a car. The only issue, then, is detecting if the edge of a car might collide with the biker. To mitigate this issue, I conceived of some concepts for sensor arrangement attached to this post.
For the next steps, we will calculate the exact requirements for sensing in different scenarios and pick the most favorable arrangement of sensors based on that.