Accomplishments this week:
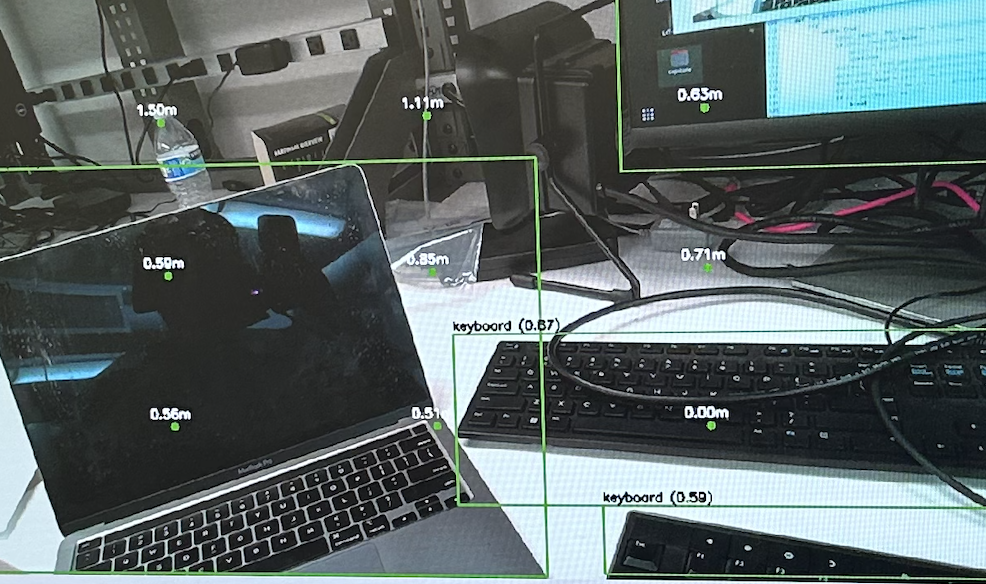
This week, I worked on performing the extensive tests for our device with Cynthia and Maya. This involved FSR testing, CV testing, haptic testing, wall detection testing, stairs testing, and integration testing. Additionally, we were able to get downstairs detection working with our device.
Reflection on schedule:
on schedule!
Plans for next week:
Work on the poster, final video, and preparing our device for the demo.