Since we’ve all been on schedule so far, we took Spring Break off. During the last week of February, we made progress on our prototype and have moved closer to system integration/testing.
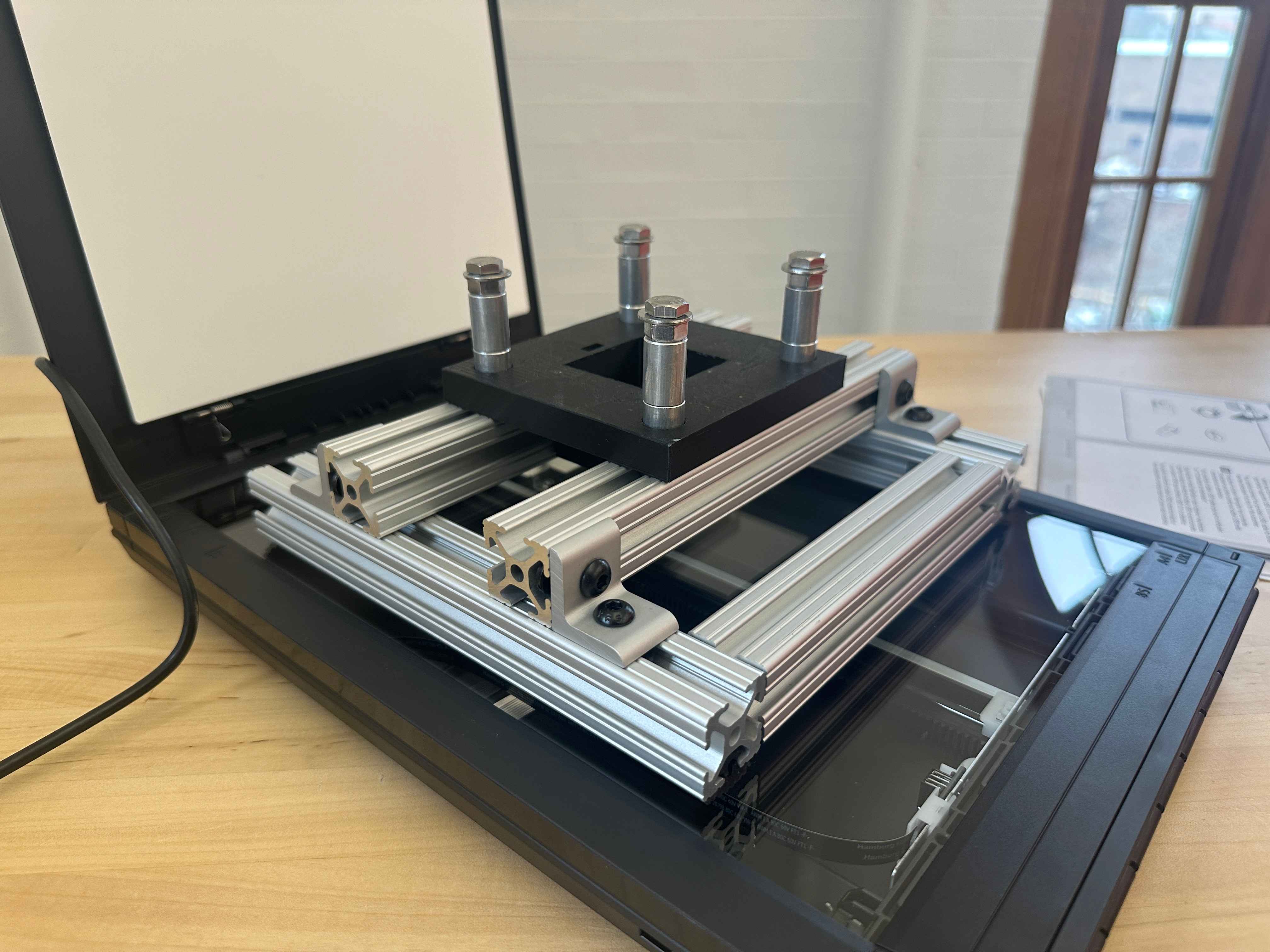
Theo built the prototype’s structure, and we’re now just waiting on the suction cup and its mounting components to finish it. See his section for specifics and a photo of the prototype on our scanner. He also made some basic serial code for sending rotation and pumping commands, as well as python code for interfacing over serial. He’ll be working with Sophia to integrate a better version of this in the final control software.
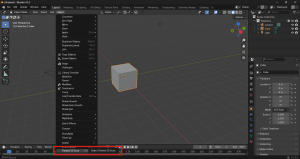
Besides the serial code, Sophia did trial tests of the flatbed scanner with the controller software and found that it had issues with no clear solution. After many attempts and guesses at what was going wrong with the scanner to computer communication, and Theo after attempting to setup the project but finding it incompatible with newer versions of Linux, she’ll be pivoting to a more modular approach that will use unique and more compatible libraries for each OS, keeping the individual OS scanning processes in separate files. This will mean a more incremental approach to ensuring each OS works well without jeopardizing the states of the other OS’s and it won’t rely on an outdated dotnet framework (NAPS2 needed version 4.8, was only supported at all to version 8, current version is version 9).
Yon finished working out the math for normal map construction and detailed his findings in the design report. He also identified 3D scanners we can use for qualification, which gives both Yon and Theo some work next week in designing and manufacturing a test object. Now that a basic python version of the normal map code is implemented and can be used for testing Theo and Sophia’s subsystems, Yon will turn to implementing the normal map math in the design report. He also still has to identify a normal map to depth map pipeline, which can be achieved either in a custom implementation, a C library, or externally through another blender plugin / tool.
A was written by Theo, B was written by Yon, and C was written by Sophia.
Part A: On the global scale, our project has possible uses in the fields of archeology, history, and design. There are no limiting factors in who across the world could access/utilize flatbed 3D scanning besides a possible language barrier in the software (which is easily translatable).
People not in the academic environment would be more likely to use this as hobbyists who want to get detailed scans of their art, sculptures, or other detailed objects. There is a small subculture of photographers who use scanners for their high DPI, and such a group would likely be eager to map their hobby into a third dimension that they can interact with via Blender or other .obj-friendly software.
There is an emphasis throughout our project on making the scanning process user-friendly and hands-off. While this is mainly meant to accommodate repetitive data acquisition, less tech-savvy people would only have to deal with a few more steps than when using a flatbed scanner normally (place manipulator, plug in cables, run software).
Part B: Our project implements a cheap and accessible way to 3D scan small objects. One significant area of application for this technology is in archeology and preservation where cheap, quick, and onsite digitization of cultural artifacts can help preserve clotures and assist dialog and discourse around them.
That said, all technology is a double edged sword. The ability to create quick replicas of historical artifacts makes them vulnerable to pop cloture-ification which could manifest in cultural appropriation.
Part C: Our project uses a low power draw, which is an environmental boon. Especially considering its competitors are larger, complicated machines that would use more energy. Our project also leverages an existing technology, therefore reusing devices and not requiring buying a larger version that uses much more material and energy in manufacturing and usage.
The simplicity of our project also lends itself to environmentalism, since we don’t use any cloud storage, AI features, or other massive energy consumption processes. We don’t even use a separate battery, drawing power from the computer through USB. Open source projects like ours are also generally more sustainable than completely commercialized sources.
Environmental organisms and discoveries can even be captured for future research and knowledge using our project. Since archaeology is a key audience, it’s not a stretch to extend that into general biology. Scanning small bones, skeletons, feathers, footprints, or other small biological features would be possible as long as they aren’t particularly frail. This contributes to the knowledge bank of biological organisms, furthering science’s understanding. The Smithsonian for example has a public access bank of 3D scans, so our project would be perfectly suited to its use for small, detailed objects.