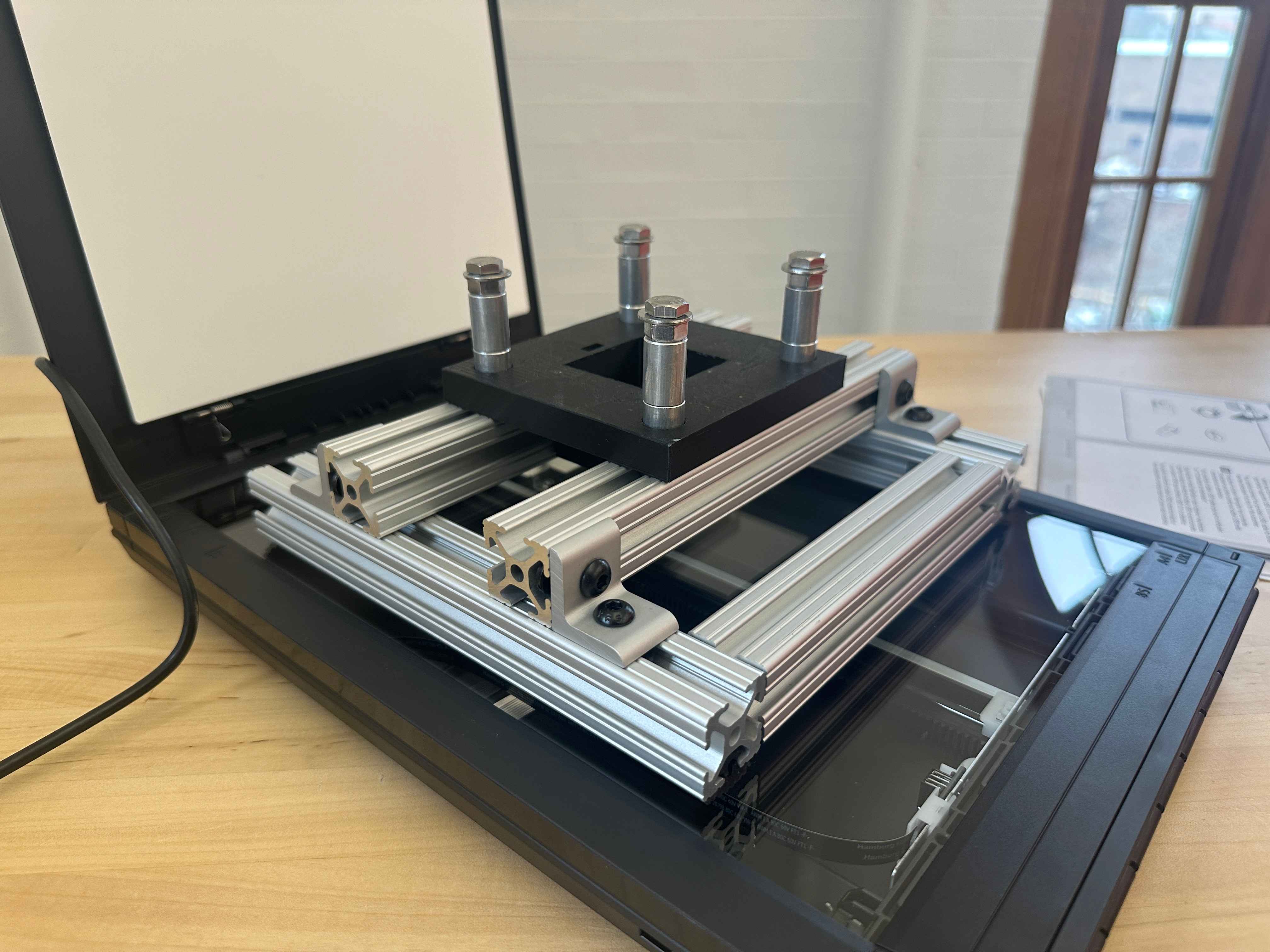
I’ve taken the past week off for Spring Break since I’m on schedule. The week before, we received the parts for the manipulator’s structure, so I actually built it (see image below). The parts all fit together besides the 3D printed mount, which needs slightly larger holes for the stepper motor to fit inside. We’ll 3D print this when we return to campus. So far, we’ve noticed slight instability and rough motion when trying to move the 3D printed mount up and down the screws with spacers. If the next iteration’s larger holes don’t enable the smooth and stable motion we want, then we’ll look into linear bearings or something similar.
We’ve also further theorized possible solutions to picking the object up during rotation. Currently, solenoids on the mount that push off of the second layer of T-channel extrusions is our best idea. This would likely work, and we would use at least two in order to deliver equal/symmetric force while sliding up the screws.
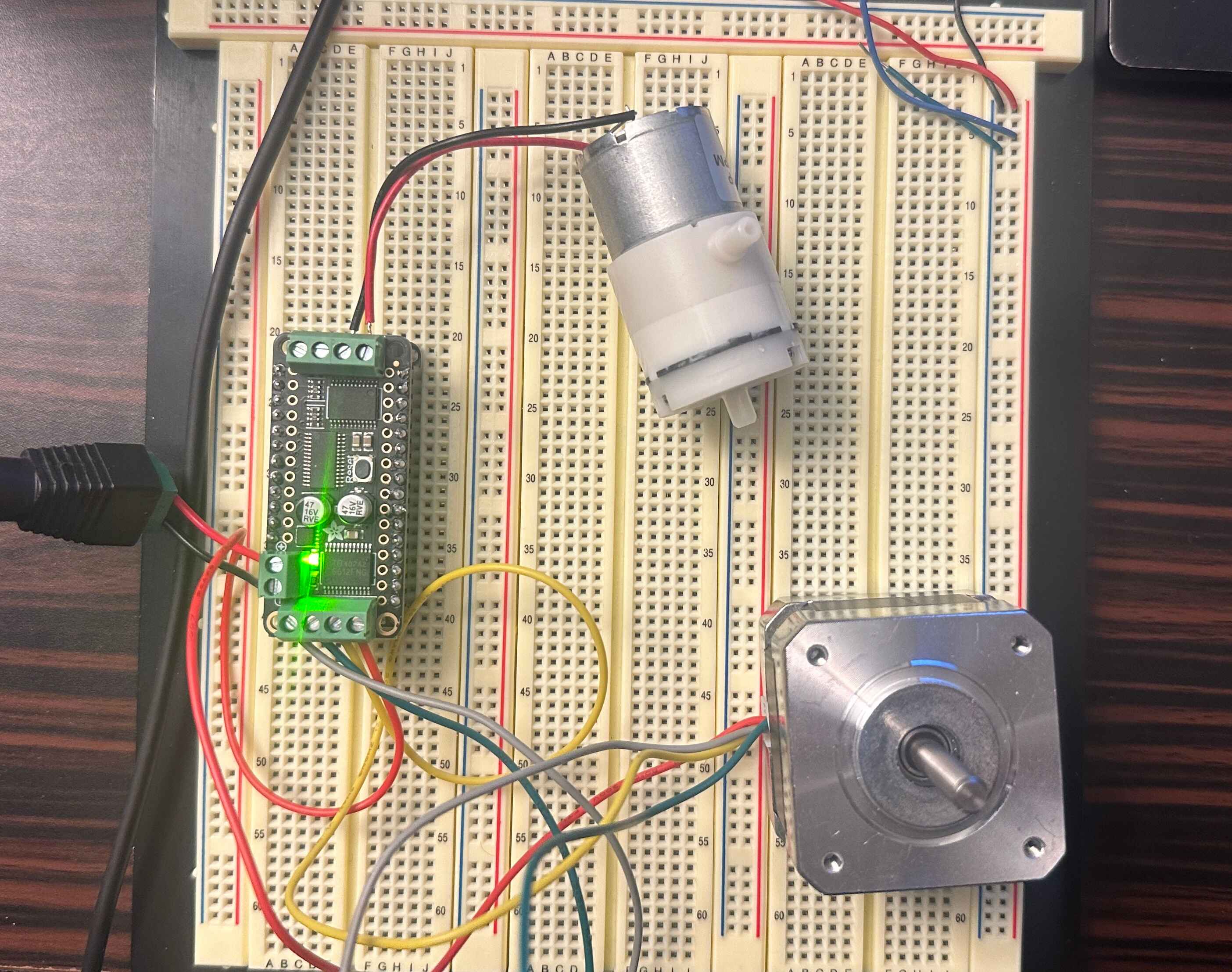
My next steps include finishing the troubleshooting on this 3D print, helping Sophia with integrating my basic serial test code with her control software, and designing + optimizing the 3D printed shaft-suction cup piece that we’ll use to connect the vacuum pump tubes and the stepper motor to the suction cup.