This past week, I’ve spent most of my time working on the manipulator hardware. We 3D printed a new mount with tighter tolerances, and it’s done a good job at minimizing the mount’s movement. The tight tolerance makes it hard to slide up and down, so we’ll probably use the linear bearings in our next upgrade (they arrived this Friday). We also laser cut the acrylic sheet and used it while scanning. It does a decent job at blocking out the noise from the air tubing, but makes it much more difficult to align the suction cup on top of the object (even more so when trying to center it). The current issues with our manipulator are off-center scans and a shadow being cast by the black stepper-suction adapter. We’re reprinting the adapter in white so it can match with the cover sheet, and we’re looking into making the acrylic cover sheet thicker. We have an extra 1/8″ sheet that we can cut identically and lay on top.
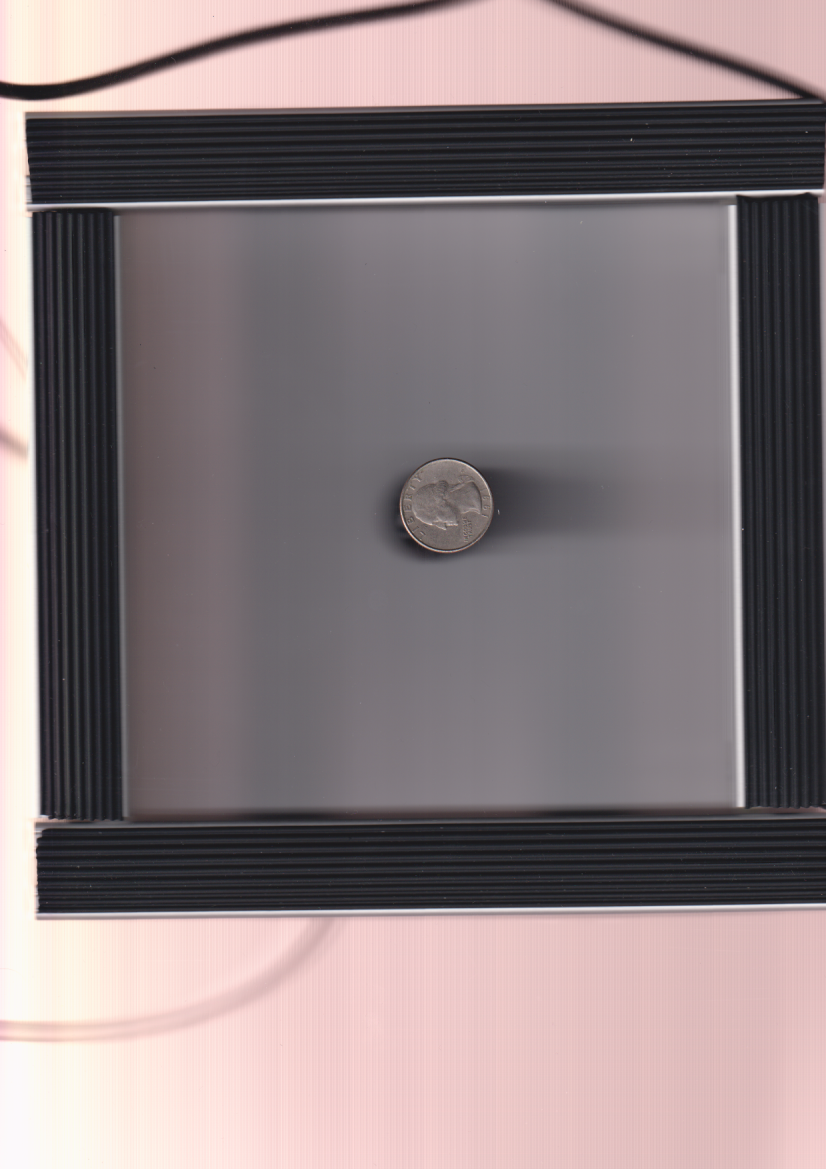
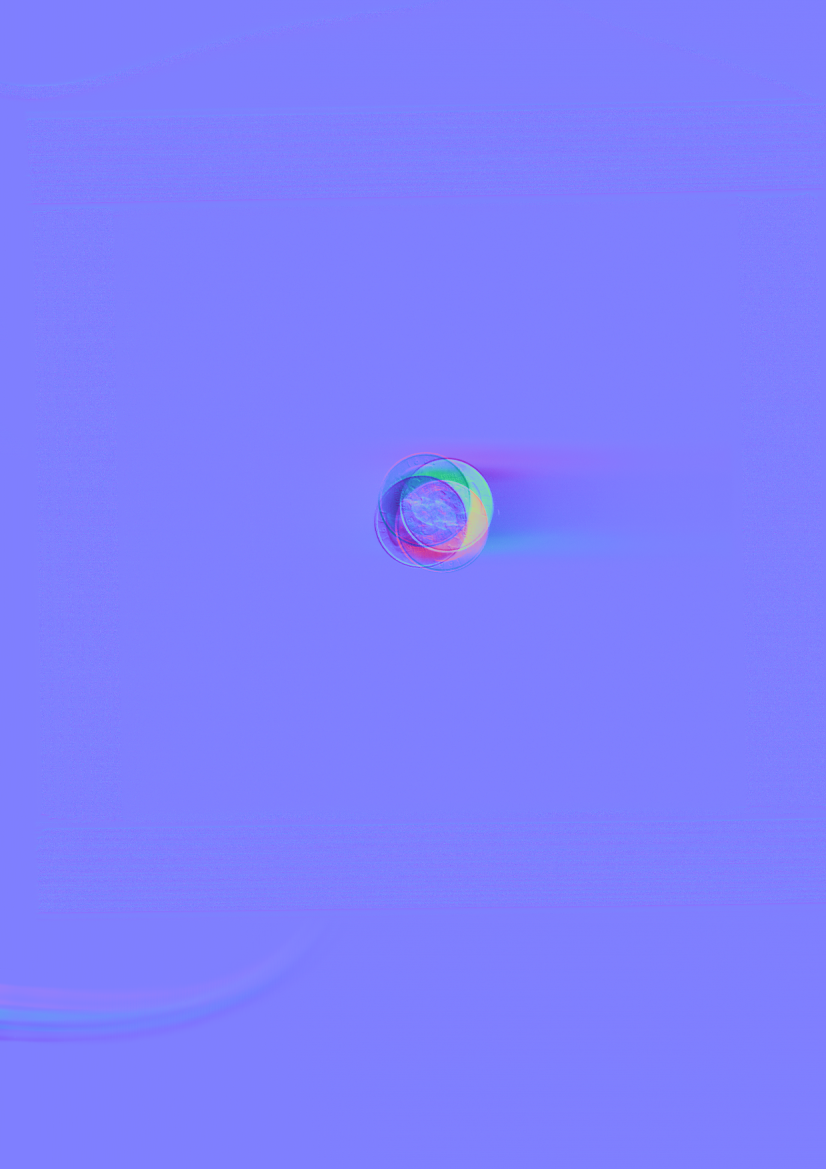
Here’s what a single scan in the current process and the generated normal map look like. The black shadow behind the object is entirely due to the stepper-suction adapter.