This past week, the most significant problems we’ve encountered have been with the quality of the scans. As mentioned in Theo’s status report for this week, the stepper-suction adapter casts a black shadow behind the object that shows up in the normal map, and the rotation is still misaligned. The new mount has tighter tolerances that prevent it from sliding around, but it is still extremely difficult to place the suction cup directly in the center of the object (in order for each vector in the normal map to align). We’ve 3D printed a white stepper-suction adapter to see if that will help (it ought to blend in with the white acrylic cover sheet), and we’ve started looking into a software-level solution to the scan alignment issue. As detailed in Yon’s status report, we have two approaches to solve the alignment issue which we will test this coming week. These create very minor changes in our system, by introducing a small amount of complexity in the ‘image alignment’ step. If the image alignment goes well and creates better normal maps, we will then be able to move on to ensuring the height map turns out well, since the results are currently skewed from the misaligned normal map. There is a normal-to-height-map module currently as detailed in Sophia’s status report, but we may need to look for alternatives or edit it for our use case of small objects, since this module was normally used on larger cases.
As we continue to improve the manipulator, we’re also looking to begin testing with objects other than a quarter. Yon has designed a test object that we can start using when we’re ready, and the manipulator ought to be able to work with any object that fits in its 6inx6inx1in space. This also would be the validation of our system as a whole. When we compare the scan we take from the model, the original model we made, and the scans that commercial 3D scanners take, we will be able to calculate how close our scans are versus commercial scans using Hausdorff distance.
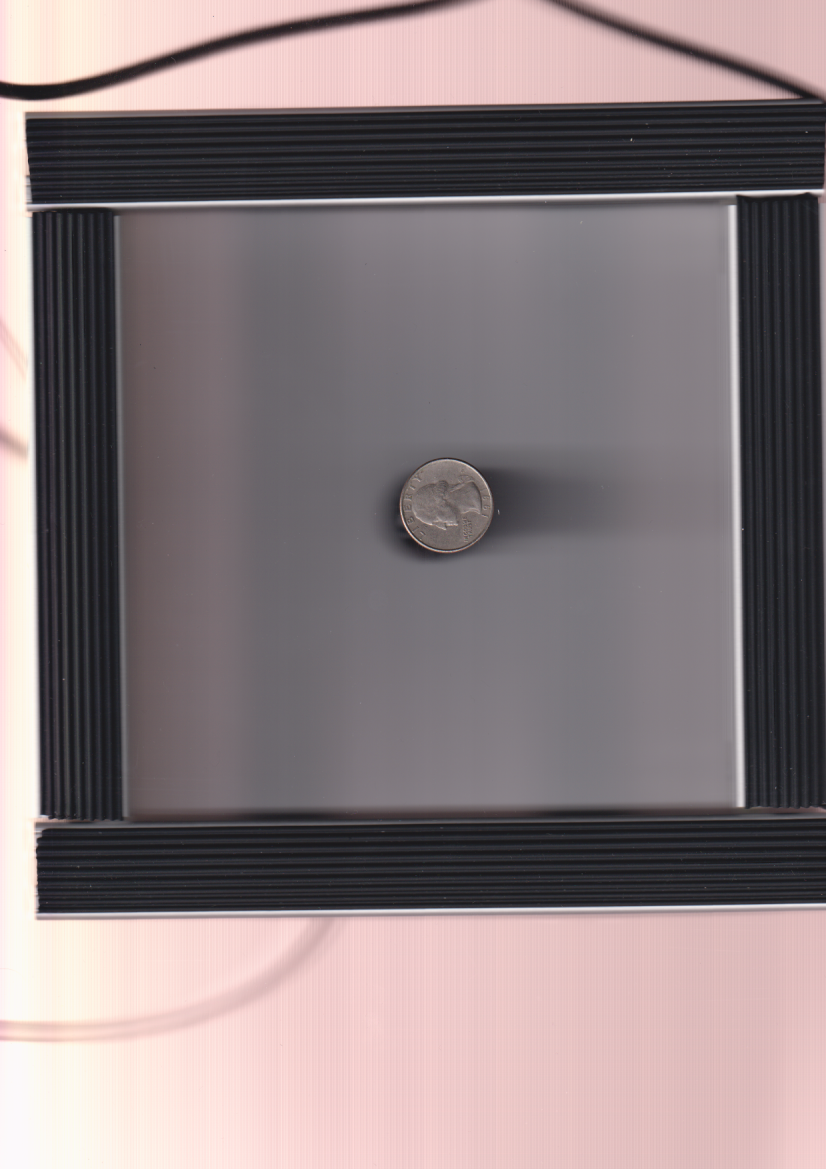
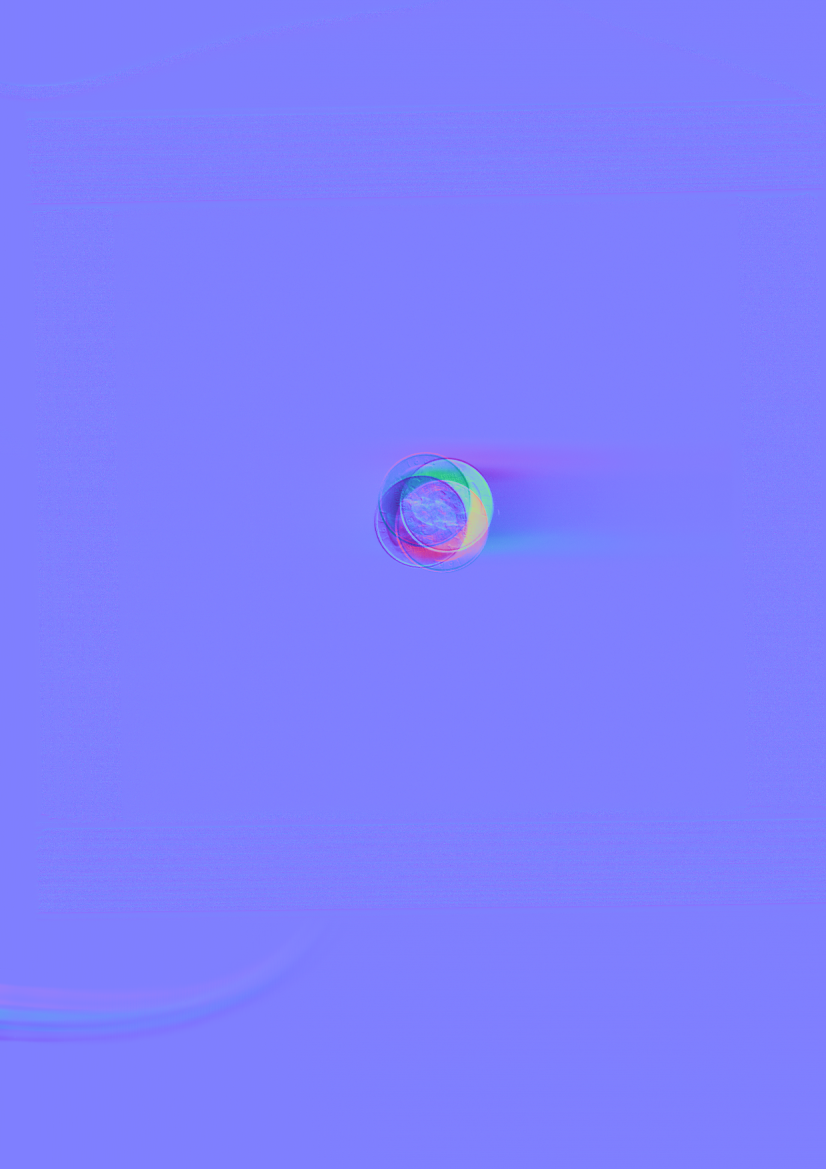
A scan from our current system and a normal map generated from it and its rotated counterparts.