This week was mainly spent working on the stepper-suction adapter, which would allow the suction cup to rotate with the stepper motor while still being connected to the air pump. It worked on its second iteration, and we were able to put together the entire manipulator. The suction and rotation work as desired, but we’ve yet to fully characterize what is and isn’t possible. All that’s left to do before demo day is make sure the delays in our serial python code are properly sized to let the entire physical rotation/suction happen. We’ll be able to do this within a few minutes on Monday.
I noticed with some of my first tests that the mount can become slanted on the guide pillars, which makes sense because those holes did not print out to the exact proper size. Rather than trying to get this right, I’m leaning toward implementing linear ball bearings that would function identically to the holes, but be properly sized, smoother, and sturdier than just a hole in our 3D print. I’ll order these on Monday.
The suction cup also sticks out relatively far down the manipulator, pushing the mount up the majority of the guide pillars that we planned to leave as slack/space for thicker objects. While this isn’t a point of failure, the remedy is as simple as having the stepper motor’s mounting hole stick less far down from the mount. Since we’ll be reprinting to ensure the linear bearings will fit anyways, one more print should solve both problems at once.
I’ve also continued work on the 3D-printed electronics housing that will be attached to the structure of the manipulator, but that is my last priority at the moment.
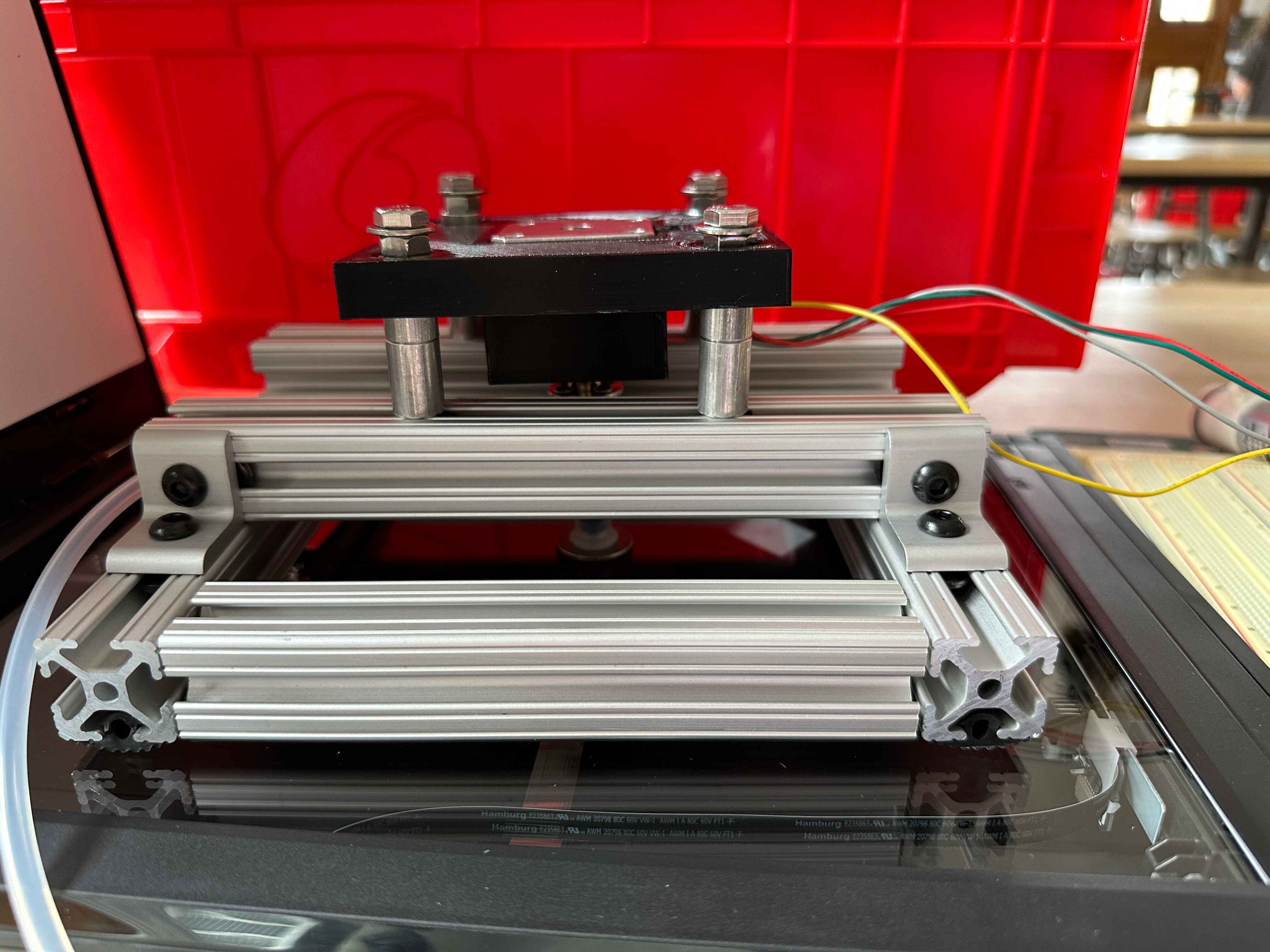
The two pictures attached below are the suction cup with the stepper-suction adapter, and the complete prototype demonstrating a slanted mount while resting on top of a coin.