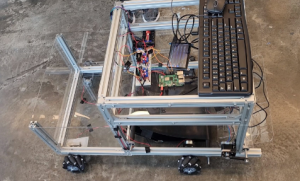
This past week, our team made durable progress on integration between the Jetson Nano Orin and the Raspberry Pi 4 as well as circuitry & movement for the wheels of the robot. We provided an image of the robot with the wheels connected to the circuitry below and two videos: one that showcases the nano sending out bounding boxes as while the pi recieved them, and a video that cases wheel movement. Both components required a few hours of debugging each, as was detailed in the individual reports. Primarily, we ran into issues ssh-ing, connecting via a specific cable, and some circuitry & component issues. However, we were able to get a durable and consistent output once we finished!
The most significant risk we are concerned about regarding the project is the pick-up mechanism and the movement of the robot. Although the wheels move, the robot itself is heavy and seems to bear down on the wheels. In addition, we discussed and tested the addition of a ramp, but have not fully installed it yet; hence, it is difficult to know whether the roller will work efficiently. We are working on alternatives for the robot to move (considering larger wheels and other testing options) and have lowered the conveyor belt to make it easier for the trash to go up the incline.
Significant changes have not been made to the design. Primarily, we lowered the conveyor belt and decided to reduce the height of the “barrier” separating the trash and the pick up mechanism (as for demo/ testing purposes, 3-4 inches is enough to collect trash). In terms of circuitry, we chose to move away from the raspberry pi hat and use L298Ns instead. Finally, we are using a usb-c cable instead of an ethernet cable. All of these changes have been described in detail earlier/ in individual reports.
We have not made significant changes to the schedule of our project. Primarily, we chose to focus on integration and updating the robot using feedback from the demo. In the next two weeks, we will be working on testing and putting the subsystems together.
Testing and verification for subsystems have been described in the individual status reports. In terms of testing the entire system, we plan to run tests in stages, as described in the design review presentation. After testing and validating the pick-up mechanism (able to pick up trash components (few iterations) while running on code), we will test and validate the entire system (robot’s capability to use object classification outputs to guide its movement towards trash components). We will record the number of trash objects detected and collected during the process. Finally, we will run multiple iterations of testing on the entire robot flow (how well the robot is able to move from start to end – detect component, collect, & look for more/ go to sleep and so on). We will record the time it takes for the robot to pick up and the number of number of components it picks up successfully.
0 Comments