

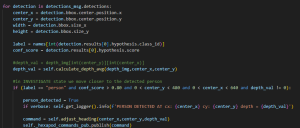
This week our main goal was to finish up a hexapod with enough of the desired behavior to be a demo. We were able to get our image to hexapod command pipeline working. I specifically worked on the software for the hexapod, focusing on the depth and the location of object bounding boxes from the Yolov8 detection outputs. I used the location of the bounding box centers as a way for our hexapod to turn toward people and follow them to a certain distance. The rest of the week I focused on restructuring our code to have our main callback function be in charge of running our state machine. I implemented more of our desired behavior so that the hexapod actually goes through various states from Search to Investigate to Found. I debugged this on the actual hexapod and ensured that it worked well with the rest of the package. I also added various checks into the code to make sure that the data we’re basing our hexapod behaviors off is accurate. Here is a snippet from one of our states:
We adjusted our gannt charts to be more realistic and we are currently on schedule. Next week I hope to implement a more complex search algorithm.