
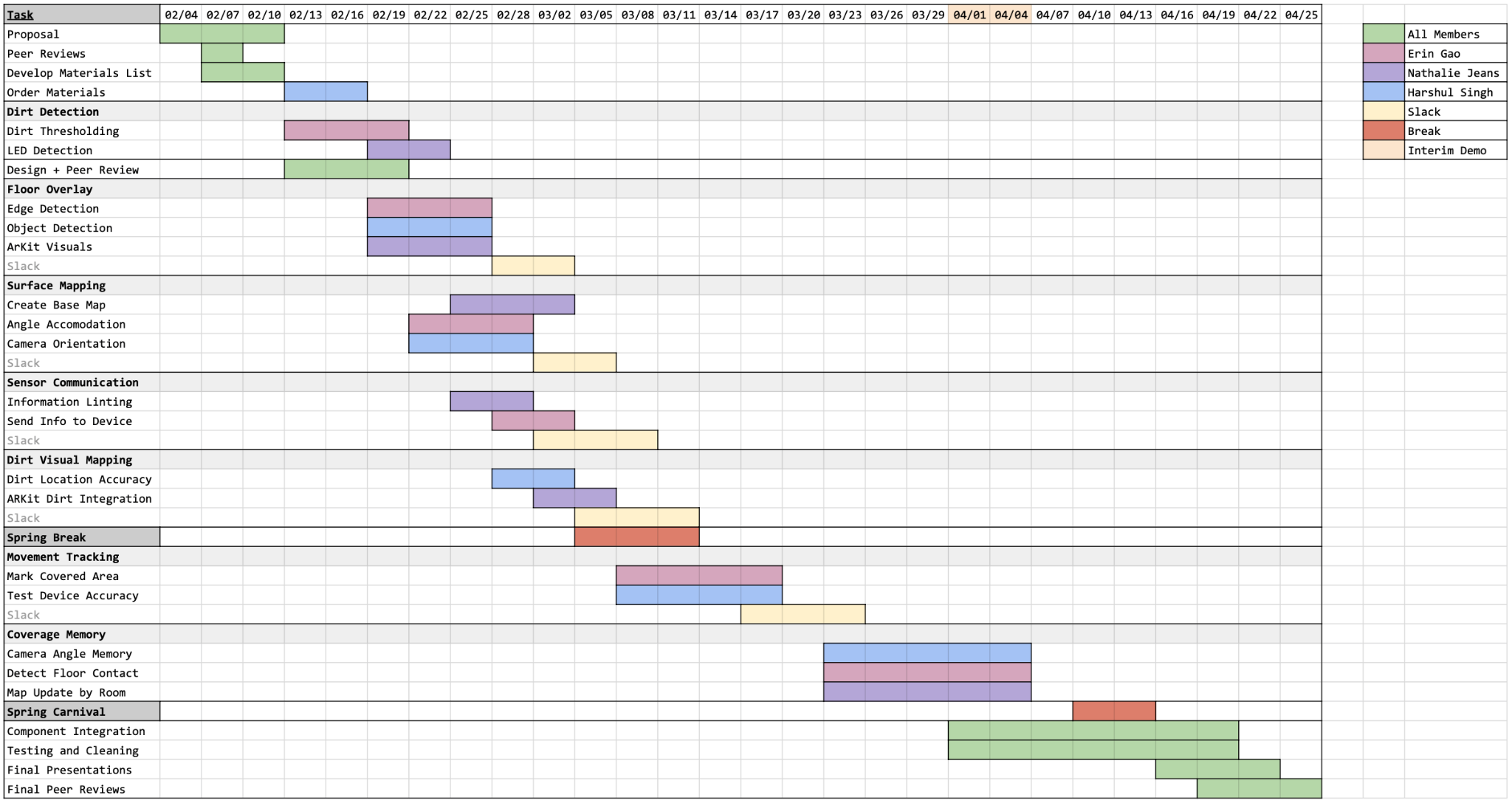
This week I worked primarily on the proposal presentation that I gave in class. I spent time practicing and thinking about how to structure the presentation to make it more palatable. Additionally, prior to my Monday presentation, I spent a good amount of time trying to justify the error values that we were considering for our use case requirements. I also worked on narrowing the scope of our project—I tried to calibrate the amount of work our group would have to do to something I believe would be more achievable during the semester. Initially, we had wanted to our project to work on all types of flooring, but I realized that the amount of noise that could get picked up on surfaces such as carpet or wood may make our project too difficult. I also spent some time looking at existing vacuum products so that our use case requirements would make sense with the current state of the products which are on the market. I worked on devising a gantt chart (shown below) for our group as well. The gantt chart was aligned with the schedule of tasks that Nathalie created, and it also showed the planned progression of our project through the course of the fourteen week semester. Finally, I also looked into some of the existing computer vision libraries and read up on ARKit and RealityKit to familiarize myself with the technologies that our group will be working with in the near future.
Our group is on track with respect to our gantt chart, although it is my wish that we stay slightly ahead of schedule. We plan on syncing soon and meeting up to figure out exactly what hardware we need to order.
Within the next week, I hope to have an answer/better response to all the questions that were revealed to our group in response to our initial presentation. Furthermore, I hope to make headway on dirt detection, as that is the next planned task that I am running point on. This would start with getting the materials ordered, figuring out how our component may fit on a vacuum, and brainstorming any backup plan in case our initial plan for the dirt detection LED falls through.