
This week I researched and sourced new components for the stand. I measured the original lead screw dimensions of the stand so I could order a copy without a knob for use in the stand. I also sourced the right motor coupler to use so we can attach our motor directly to the new lead screw. This made much a much simpler and more effective design as shown in the image below.
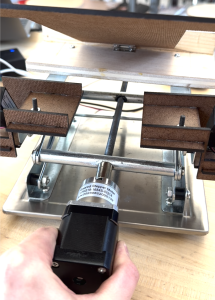
I also started testing the new 5:1 motor with a gearbox and thankfully it has enough torque (as calculated) to fully lift the computer up and down the full range of motion. I did a series of up/down tests with the laptop on the computer stand to ensure that the motor had enough torque and endurance to meet the user’s demands in a worst case scenario. I did 3 up/down repeated tests. I also had to design and 3D print a custom motor coupler to perform the tests because the metal motor coupler had not arrived. As a result of the tests, we have concluded that the motor torque is sufficient.

