
These past two weeks, I brought together the Rover’s components.
A week ago, I used the aforementioned kinematics scheme to make the arm move into the correct position when commanded. Shown here:
 (I commanded the arm to go 20 cm away)
(I commanded the arm to go 20 cm away)
By Sunday night, we had all the electronics made but no code to unify the parts. Initially, the thought was to use parallel processing in Python, or maybe sockets, to bring everything together, but I re-evaluated it and I was able to put everything into one while loop and have the Rover function. I created (essentially) a state machine to describe the way the Rover operated.
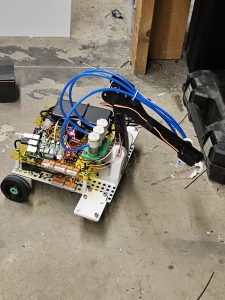
Ultimately, the Rover (draft 1):

All of the electronics were “assembled”, and it had functionality. I essentially partitioned the motion of the servos to move from Point A to B in many steps, effectively smoothing out the motion and making the arm motion more gentle. One problem it faced was that my smoothened kinematics code would operate arbitrarily, sometimes slamming the arm into the ground at full speed. I realized that I should be checking the absolute value of the difference between the arm’s current position and its last (rather than just comparing the equivalence), and the arm motion was smooth. With the state machine I wrote in Python, the Rover was able to drive from point A to B, and pick up an object once given the coordinates from the camera. Once I verified functionality, I cut out some new base plates on the iDeATe laser cutters and on Friday, we re-assembled the Rover and neatened the wiring.
Rover (v2):
For the first time in awhile, I think that we’re on schedule. By next week, I want to make sure operation is agile and can be set up quickly, and I want to make sure that the pickup sequence is more flushed out. Right now, as I’ll cover in the final presentation, our accuracy is lower than we’d like, and I want to fix that.
I needed to re-learn python once more to make this project work. I did this by just looking up tutorials and using my pre-existing knowledge of programming in general to bring them together to make what I wanted function. I needed to learn how to create perfboard circuits, something I’ve wanted to learn for awhile now, and I was able, thanks to the motivation provided by this project. I needed to learn how to organize power electronics, and I learned that with the help of the people in Roboclub, whose help I asked quite a lot.