
- What did you personally accomplish this week on the project
More testing is done on the braille cell, and I have done some detailed optimization on the CAD models. One persistent problem we were facing is that if we 3D print the body of the pin to be the exact same width as the pin holder, they will induce a lot of friction, but if we were to sand the pin down a bit so that it can slide smoothly, the pin will rotate slightly when the slider is pushing it up and down, resulting in a lot of jamming. A lot of experiments was conducted as attempts to mitigate this, and so far the solution with the best result is to include a slightly wider strip at the upper end of the pin to reduce rotation, while only adding a small amount of extra friction. We also experimented with using graphite as a solid lubricant, but oddly this does not improve the result observably. - Is your progress on schedule or behind?
Our progress is on schedule to be demoed at the final showcase, our project works as of now, but the actuation speed is way behind our design requirement. It will be tough to optimize it to meet our initial goal due to fabrication precision and limited testing time. - What deliverables do you hope to complete in the next week?
Beside optimizing the mechanical side of things, I also plan to “beautify” the project a bit more by 3D printing the product using black, white, and orange color palette, so that the audience can get a getter sense of how our actuator is working. I also plan to make some visual elements for our posters and final report (beside writing them) to better showcase our mechanism, like a exploded view of the assembly.
Ziyu Li’s Status Report for April 20th, 2024
For the past two week, I made substantial revision to the CAD design of our actuator. The motor no is placed in the middle of the two sliders, which drastically reduces the footprint of the device. The gear and rack configuration is relocated to the side of the slider, instead of up of down.
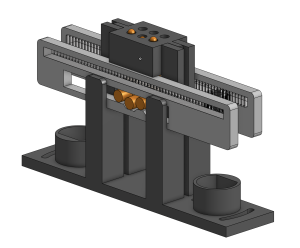
I also 3D printed and tested the integration of the system, as well as some preliminary test on the motor integration, which is shown here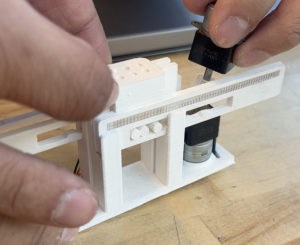
We are on track to complete the project on time. Next we will perforce more verification test, and optimize for motor actuation speed and torque.
- As you’ve designed, implemented and debugged your project, what new tools or new knowledge did you find it necessary to learn to be able to accomplish these tasks? What learning strategies did you use to acquire this new knowledge?
I am mostly in charge of designing the CAD model for our actuators, and fabricating the product using 3D printing and laser cutting. I found myself having to engage with every detail of the softwares tools I used before more, especially because we are trying to build something that is both small and precise. I have to rapidly prototype with different 3D printing parameters to find the one the give the best result. I also had to relearn gear design to make sure the actuation is fast and smooth.
Ziyu Li’s Status Report for April 6th, 2024
What did you personally accomplish this week on the project?
Two major things is done this week: 1. using hand to hold the motor to actuate the slider from last week, I identified that the best place to mount the motor is actually above the slider, not underneath like I expected. This is likely due to when motor is underneath, it also provides an upward force to the slider, causing it to jam with the pins more easily. Mounting the motor on the top can eliminate this non-horizontal force since the support for the slider is underneath. 2. Given this, I redesigned the whole actuator by allocating more space between the cover and the slider, I also designed and tested the motor mount, which at the moment does not work perfectly since their are some tolerance differences from the 3D printer, but I am confident that I can solve this tomorrow.
Is your progress on schedule or behind?
If compared to the original plan, which is to build 10x of these actuators and having with coordinate with each other, I am definitely behind. However, since the interim demo, we acknowledged that having one braille cell work perfectly is more important than building a ~70% working whole, and given the difficulties in this process is much bigger than we expected, we have scale down to that. And in this regard we are on schedule.
What deliverables do you hope to complete in the next week?
A single braille cell working, shifting to different braille patterns.
Test that I am planning to run
After I get the braille cell working next week, I’ll focus on three major tests to make sure our product is meeting the original design requirement:
- activation speed: the slider should be able to move from one end to the other under 200ms.
- Jam frequency: the slider should not be jam in between at least 15 actuations (switching from one position to the next under the speed outlined in 1)
- Jam recovery: the actuator should automatically detect jam situation and recover from it using the back-and-forth motion in under 500ms.
Ziyu’s Status Report for March 30th, 2024
What did you personally accomplish this week on the project?
After some tweaking with the 3D printer settings, I’m able to reduce the size from 3x to 2x the American braille standard, leading to significant miniaturization. I also designed and 3D printed a scalable base, which is used to hold a single braille cell and its corresponding two sliders now, but can linearly expand to hold more in the future.
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
The progress is on schedule in terms of building a robust slider actuator. The progress is behind schedule in terms of building out a fully specced product. Importantly, because the actuator fabrication process is so intricate, we should communicate internally about reasonably scaling down the project.
What deliverables do you hope to complete in the next week?
I will work with Samay to integrate his motor into my based braille cell. Right now the slider can be moved by hand, but next week to need to fully automate this process, and conduct testing on slider’s move speed, location detection, etc.
Ziyu Li’s Status Report for March 23rd, 2024
This week I focused on iterating on the fabrication method for for braille slider actuator, and have the following results:
Size:
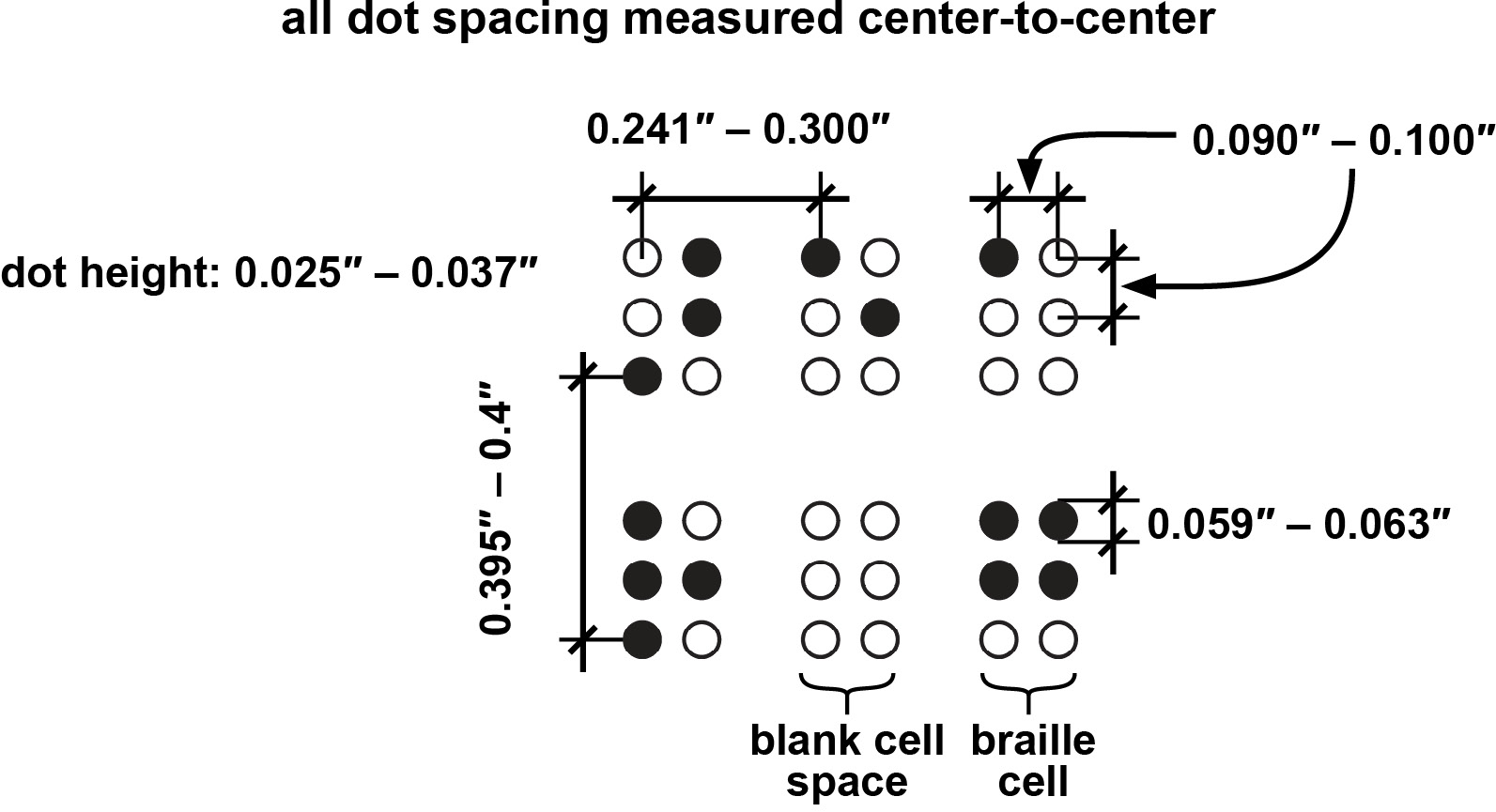
The ideal size requirement is shown above, which reflects the standards published by braille authority of north America. After several attempts to 3D print my CAD design in this dimension, I found that this miniature scale is nearly impossible to achieve, and the few actuator parts that did got successfully printed are all too fragile to meet our rigidity requirement. This is a problem that cannot be easily solved without major changes in our fabrication method and material, which we deemed outside of scope of this project and our open source requirement.
After much more testing and iteration, I have found that three times the standard sides provides easy fabrication while retaining a reasonably small size. The size of our tested module is still within limits because we have seen much bigger braille texts in use in public settings such as those in museums and elevators.
Deliverable for next week:
Next week, we should start integrating our electronic parts with the fabricated and tested actuator, in preparation of our interim demo. The end result should be a standalone 3×2 braille cell, that can be actuated by the Arduino nano controller automatically according to some set patterns in code.
Ziyu Li’s Status Report for March 9th, 2024
What did you personally accomplish this week on the project?
- I detailed the layout of the device in CAD to get a better sense of how different parts will fit into each other. I also cleaned up the CAD a lot to make it fabrication ready.

- Design report writing.
Is your progress on schedule or behind?
The progress is on schedule as long as we can start 3D printing on Monday.
What deliverables do you hope to complete in the next week?
3D printed design with different size / slope / … (every CAD parameter mentioned in the last report) and a report of how well each is functioning.
Ziyu Li’s Status Report for Feb 24th, 2024
This week I spent a lot of time in CAD software designing our new actuator.
Since we need to rapidly fabricate and test these actuators in different configurations (slider slope, material, lubricate method, form factor of actuator), great care is taken account to parameterize the design (which is both time consuming and rewording for me as a first timer).
One additional thing to emphasize in this report is the original source of this clever mechanism. During this week’s design presentation, I cited the original video from Ulmas Zoirov in the presenter’s note, but not on the slide itself, and this created unintentional confusion about the source of the idea. I apologize for this major oversight, and wanted to emphasize that this is Ulmas Zoirov’s idea, and we mainly want to iterate on this and engineer his vision in real life (since no physical device of this design is ever made, and we could not find further information on the future of his project).
For next week, I will be fabricating these CAD parts using resin 3D printers and experiment with the actuation by hand, to provide an initial feasibility analysis. I will also work on a much more formal and much more in depth design document.
Ziyu Li’s Status Report for Feb 17th
This week I mainly focused on researching different braille pattern actuation patterns, and coming up with a viable solution that is both cheap and compact. We research three main solution: 1. Electromagnetic actuation, like push-pull solenoid 2. Stepper motor paired with more intricate mechanical design, and 3. A slider solution that is able to enumerate a three-dot pattern, and use two of the same slider config to constitute each braille character. The final solution is what we settled on, as it is a. extremely cheap to implement, b. low fabrication difficulty, and c. is able to provide a close to standard braille pattern size. I am currently working on a full 3D model of this system in CAD, but for reference people can check out this video: https://www.youtube.com/watch?v=rTzhWKBfiuk
Ziyu Li’s Status Report for Feb 10th
This week I put most of my effort into learning PCB design online. Since our project require us to layout linear actuators in a compact way, this would definitely be needed further down the road. No one on the team have any practical experience with this field, so I had to learn from scratch, which was a fun experience. Although our proof of concept will likely not involve any PCB, I would still like to place my one first order within next week, so that we can be sure this won’t be a challenge in the future.
Another thing I worked on is I researched the different mini electromagnetic actuator components that are readily available on the market right now, and locked on a 6mm one that seems to be promising. The idea is we would like to place the order for this component in small amount next week, and test its capabilities. Ideally we can fit some kind of already-existing solutions into our system.