This week we worked on finishing up the robot design and laser cutting it, assembling the robot, getting started with the motor control, and interfacing the ESP8266 and connecting to the cloud. We also worked on the design review presentation and got started on the design report. We are currently focusing our efforts on the random exploration approach and will be setting up the motor control code accordingly.
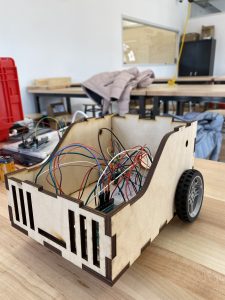
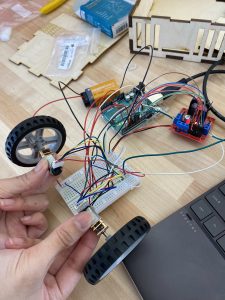
We had to make some modifications to the robot chassis, including holes for the wheels, and a structure to lift the motor up to the correct height for the wheels to touch the ground. We found some challenges in securing the motors because of the force on them from the wheels, and are working on adding a secure structure that can go over the motor snugly so that it will not move while the wheels are turning. We all met to work on getting the motors set up connecting to the Arduino, and see how the components with wiring fit into the robot chassis, which was not technically under our task assignments, but we feel it was necessary to get an understanding of how everything will look once it is connected with our different systems.
We are currently behind on the sensor system assembly, as one of our parts (the Grove Multichannel Gas Sensor) has not come in yet. We will start collecting data once this part arrives, and in the meantime, will be setting up Azure templates for the BME280 and the ENS160 sensors to the cloud.