Last week all the team members are continue designing and implementing both hardware and software. Our team members also gathered together to discuss what we have learned from the ethics assignment and considered worst-case scenarios when our product is used badly.
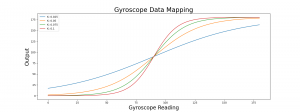
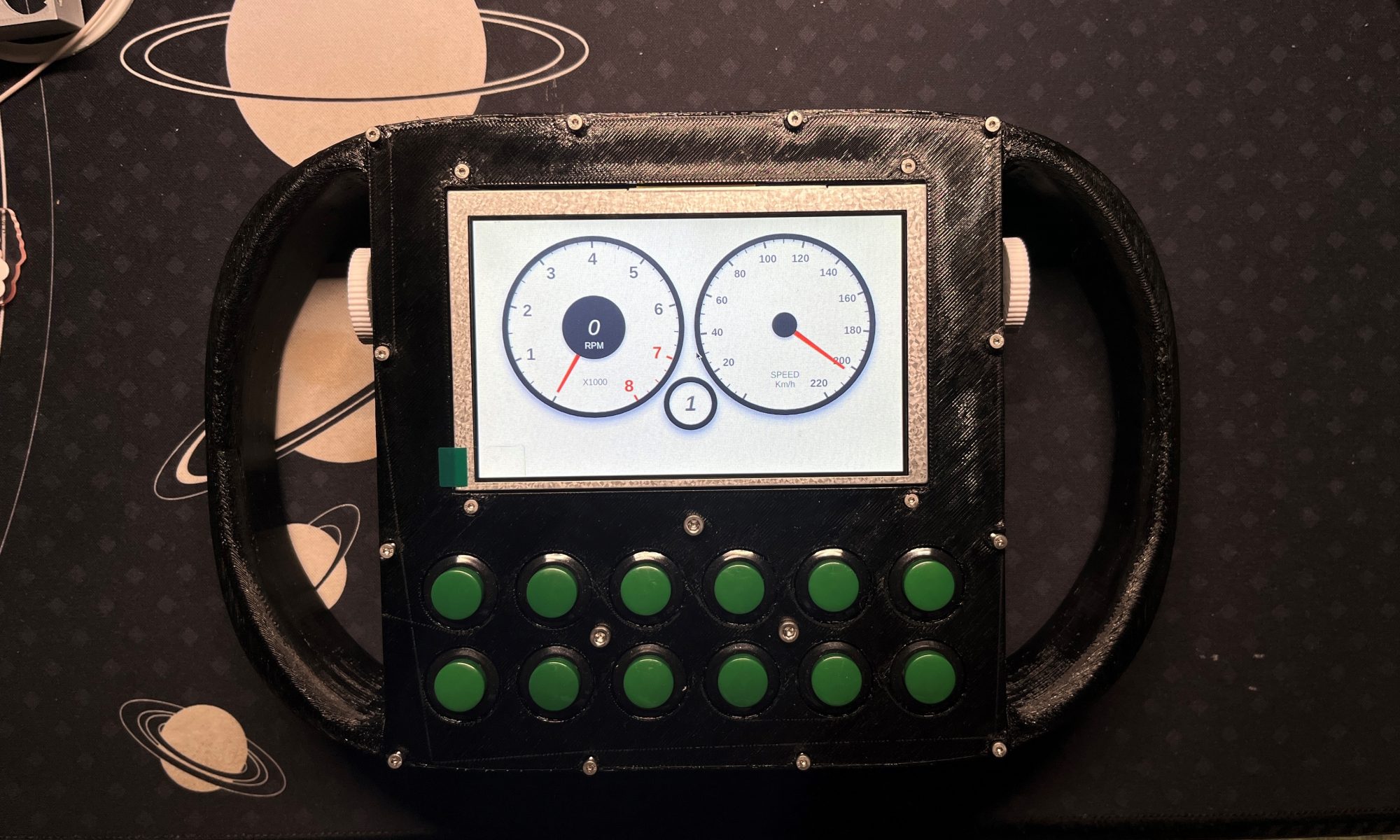
The hardware system part has made progress in wiring and is expected to be finalized by this weekend. The gyroscope system has generated the design on processing raw data from angular velocity and accelerations to degree output. For now the workflow of geroscope system is finished with design part, the next step will be start testing once the hardware system is ready. The program on RPi works well for now but there are still some issues with the packages on the PC that needs to be resolved. We are all working on our pieces so a reasonable prototype can be put on during the interim demo.
Our team is still a bit behind schedule as the interim demo is approaching. We need to have more meetings next week to synchronize our progress and discuss in what way we should present our progress during the interim demo.