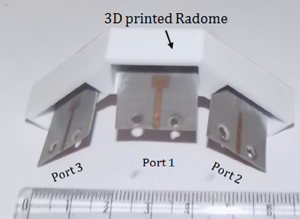
This week, I acquired parts for the standalone attachment, including the Raspberry Pi and temperature sensor. After ordering a GPS module, all required parts for the circuit (others sourced from TechSpark and previous coursework) would have arrived and the whole circuit would be integrated. Literature also confirms that a suitable radome for patch antennas can be 3-D printed with PLA as the material, which is available at CMU. The knowledge to build the circuit was learned in 18-220. I will implement the below simple slotted radome into our 3-D printed chassis (Karthikeya et. al.)
I also confirmed that I can use the drone, but I will also build the standalone attachment for the MVP, adding time to the schedule. Due to focusing on the circuit instead of the radar data, parts in my schedule have swapped since I previously planned to build the circuit after working on processing radar data, so I am behind schedule for data processing. For the next week, I plan to finish implementing real-time data collection from the radar and generating range-doppler maps as input to the neural network.
0 Comments