This week, our team has been working on the foot device, visualizations, and algorithm for the back device. We are currently on schedule to be finished by next week. As stated in previous reports, our greatest risks involve the devices not working properly. To mitigate these risks, we have made sure to think carefully about the designs and tested the devices.
In terms of testing, our team has tested both the back device, foot device, and web app. For the back device, we did tests to ensure that the data we received was accurate and also did tests to make sure that the data sent to the web app matched the data sent from the Arduino. Initially, the values we had were different, however after looking over the code, we found and fixed the bug. We also created visualizations for each sensor and verified the results by comparing our generated visualization with our observations. Furthermore, to test the foot device, we placed different weights on the sensors and checked their resistance. While testing, we realized the weight threshold was too low, so we had to increase the resistance.
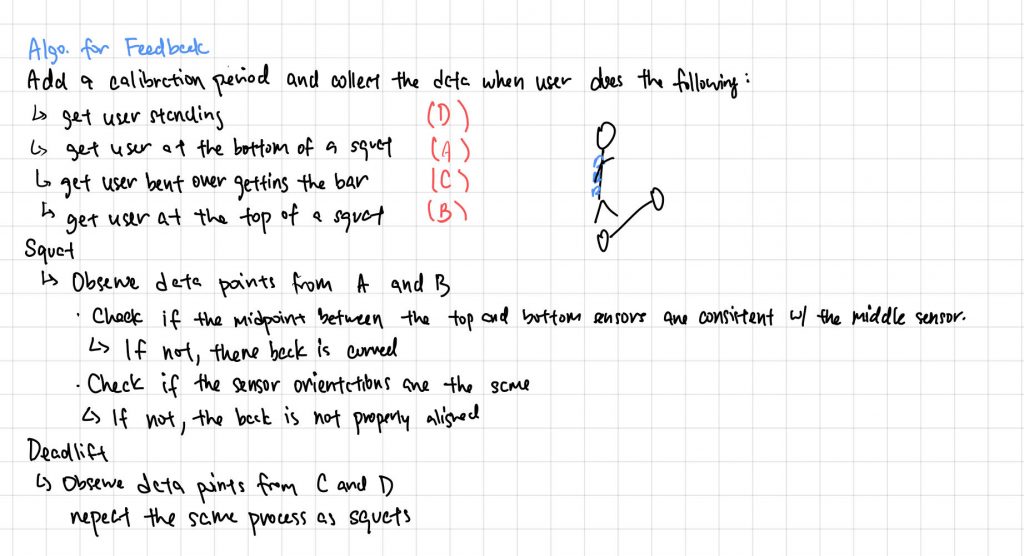
To test the entire system itself, we plan to wear both foot sensors and make sure that when applying equal or differentiating pressure, the read resistance values are equal to each other. In addition, we will continue testing the back devices and algorithm by wearing the back device and standing in different positions and then verifying the results match the feedback we want.