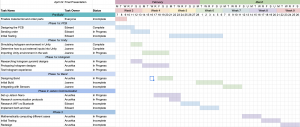
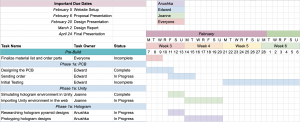
We delivered our design review presentation on Wednesday. Overall, it went pretty well. Creating the presentation gave us a lot of insight into what the next few weeks are going to look like, and we discussed our schedule more in-depth after the presentation to cover ground in areas that we still need to work on.
The PCB board is being manufactured and will be shipped next week, and we’re currently testing individual sensors to see how they behave. Additionally, we decided on using MQTT communication since it was the most common IoT communication used, especially with the Photon Particle. We began testing the sensors and developed a visual interface using JavaScript and HTML to see how the sensors detect objects close by. For the most part, we’re able to tell what sensors are going off when a finger comes close by, and we can also almost guess which direction we are swiping. This is a good indication that our rotation gesture recognition algorithm may actually work.
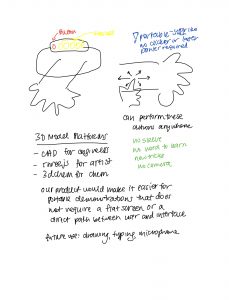
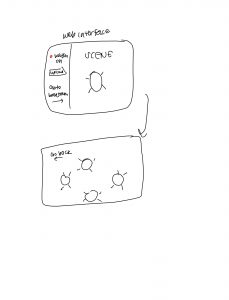
We also started the web application portion of our project. We have figured out how to embed the Unity application onto our Django web app and communicate data between our Web application and Unity.
Together, we worked on brainstorming how the web interface will look like and how it will be implemented. Joanne will primarily be working on getting a demo of that working soon. Edward will test out the PCBs once they are shipped. Anushka will work on getting the Jetson to boot and run code. We seem to be on schedule this week.
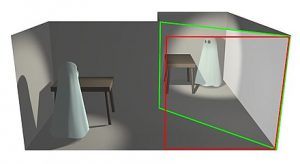
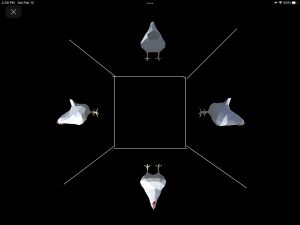
An issue that arouse was that the VL6180X sensor can read data in a 25 degree cone, and when a finger gets too far away from the sensors (75-150mm range), all the sensors will say that they see an object. We have no idea how this will look like exactly, so we created a visualization to see what would happen if a finger gets too far away. Would the finger look like a line? Would it have noticeable dip? We will need to explore this once the PCB is fully done and verified, which might take a while and put us behind schedule.



{kind=link}