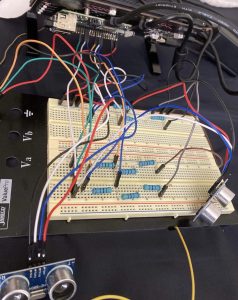
On the software side, we encountered issues that http requests cannot be received by Pi. After testing, we found out that port forwarding is preventing the http requests from reaching Pi. We’ll be looking for solutions to circumvent this issue. (Detail in Roger’s report). On the computer vision side, we’re able to setup camera on the raspberry pi to run OpenCV algorithm. On the sensor side, the communication between ultrasound sensor script and the software is finished, and the runtime of parking spot availability is reduced. This allows us to quickly detect entering/exiting of cars from the spot, and later providing navigation to leave the garage once a car leaves.
We’re currently behind schedule due to the modification of design on the server side. We’ll try to resolve this issue by next week.