
This week, we assembled most of our parts to the belt and implemented an algorithm for depth camera calibration.
For belt assembly, we have successfully mounted ultrasonic sensors, vibration motors, and the Arduino onto the belt. A photo of the current status of the belt is shown below. For more details, check out Alex’s status report.

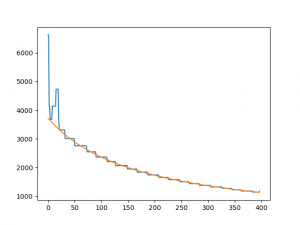
For depth camera calibration, we have successfully found a way to sample only one pixel column of a single depth camera frame and construct a sufficiently accurate ground truth model. A graph of the modeling (orange line) of depth information (blue line) is shown below. For more details, check out Ning’s status report.
Next week we plan to finish assembling the belt and complete implementing the obstacle detection algorithm for the depth camera.