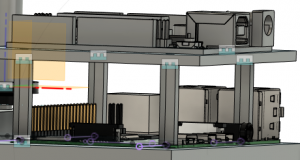
Pat and I worked this week to integrate the GST and servo. We were able to control the servo from the GST. We used pyserial in GST to send angle information. For Arudino we just opened the port to constantly receive information sent from GST. However, the poker logics hasn’t been fully implemented yet, so we are hardcoding the rotation right now. We plan to show integration of servo and GST during our demo Wednesday. I also printed out the 3d components and assemble them together. One problem is the standoff we ordered are not long enough so I will go to home depot tomorrow to see if there are longer ones. Otherwise might need to order from Amazon. Everything is looking good. Next step is probably figure out the actual poker game logic and tried to integrate the camera with the GST, and if we have more time, we can add additional feature Gary mentioned, which is feedback from the camera to pi and pi to servo to make sure we pointing to the stack accurately.