- Current Risks and Mitigation
- RTABMAP has poor performance. It is jittery and loses tracking very easily. Our mitigation strategy is to switch to ORBSLAM, and if that does not work then we will do localization without vision (using IMU, GPS, and wheel encoders, yet to be tested outdoors).
- Changes to System Design
- We may be transitioning to GPS+IMU+wheel encoder localization method since visual methods lose tracking easily. Sebastian will evaluate ORBSLAM to determine if it is a good replacement.
- Schedule Changes
- We were slightly delayed by our mistake with our motor controller last week. We discovered the Roboclaw has a LiPo voltage cutoff set to 21V, and we set it back to the 3 cell range. Now we have an extra Roboclaw (backup purposes only ;))!
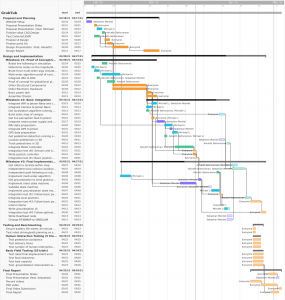
- GrubTub UPDATED Gantt Chart PDF
- We have focused on getting basic local planner functionality and finishing the robot state machine and groundstation state machine interfaces. Open items include pedestrian tracking, pedestrian avoidance, and mapping.
- We are confident this can be done in 3 weeks with proper teamwork and execution. The difficult part of hardware integration is done, and we can focus on abstracted software.
- Progress Pictures/Videos
- We did small scale testing that demonstrated our robot’s ability to localize and provide controls to reach its waypoints.
- The robot drives through a sequence of waypoints tracing a square indoors: Multiple Waypoint Following Indoors Video
- The robot drives through a sequence of waypoints tracing a square outdoors: Multiple Waypoint Following Outdoors Video
- The robot’s view of its path and localized map: Robot Map and Path Video
- The robot performing a mock delivery: Mock Delivery Indoors Video

Carnegie Mellon ECE Capstone, Spring 2021 | Michael Li, Sebastian Montiel, Advaith Sethuraman